 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Robotic Prosthesis for an Amputee Drummer
Dec 13, 2016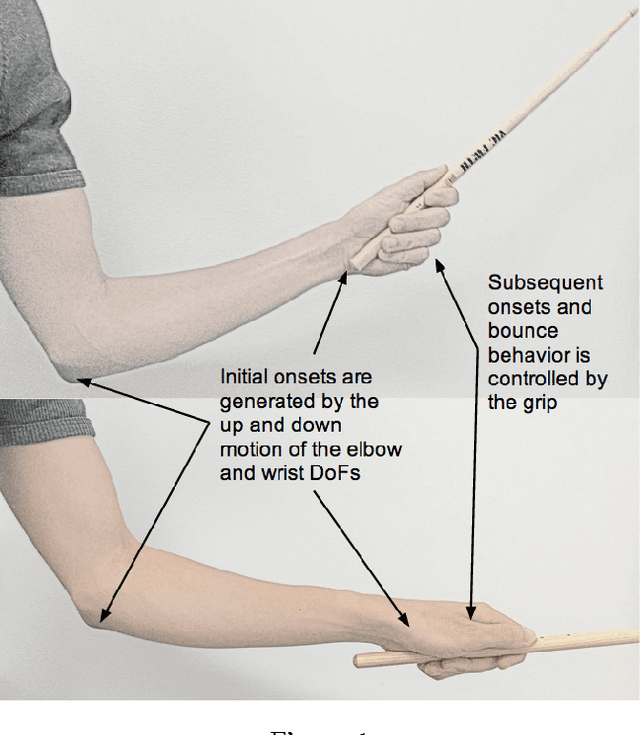
The design and evaluation of a robotic prosthesis for a drummer with a transradial amputation is presented. The principal objective of the prosthesis is to simulate the role fingers play in drumming. This primarily includes controlling the manner in which the drum stick rebounds after initial impact. This is achieved using a DC motor driven by a variable impedance control framework in a shared control system. The user's ability to perform with and control the prosthesis is evaluated using a musical synchronization study. A secondary objective of the prosthesis is to explore the implications of musical expression and human-robotic interaction when a second, completely autonomous, stick is added to the prosthesis. This wearable robotic musician interacts with the user by listening to the music and responding with different rhythms and behaviors. We recount some empirical findings based on the user's experience of performing under such a paradigm.