 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCanonPose: Self-Supervised Monocular 3D Human Pose Estimation in the Wild
Nov 30, 2020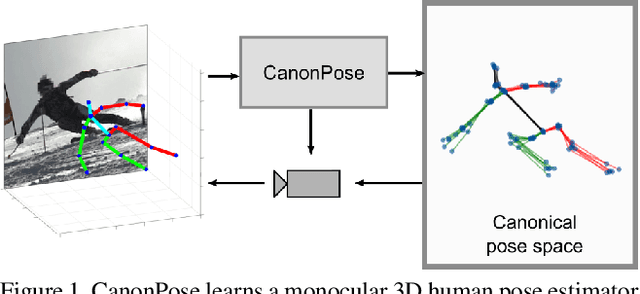
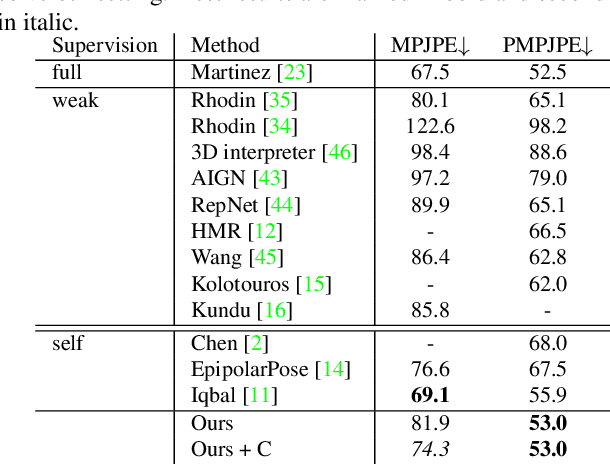
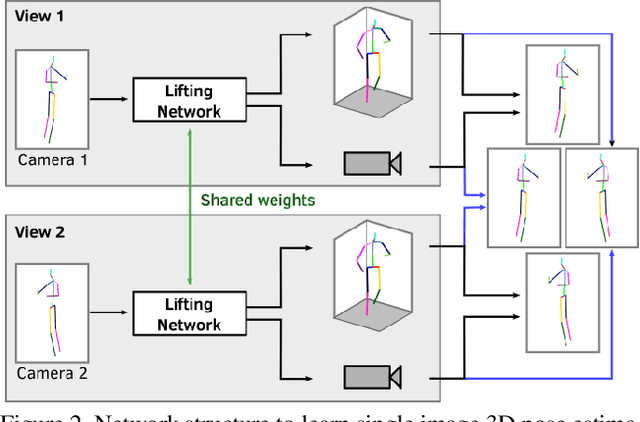
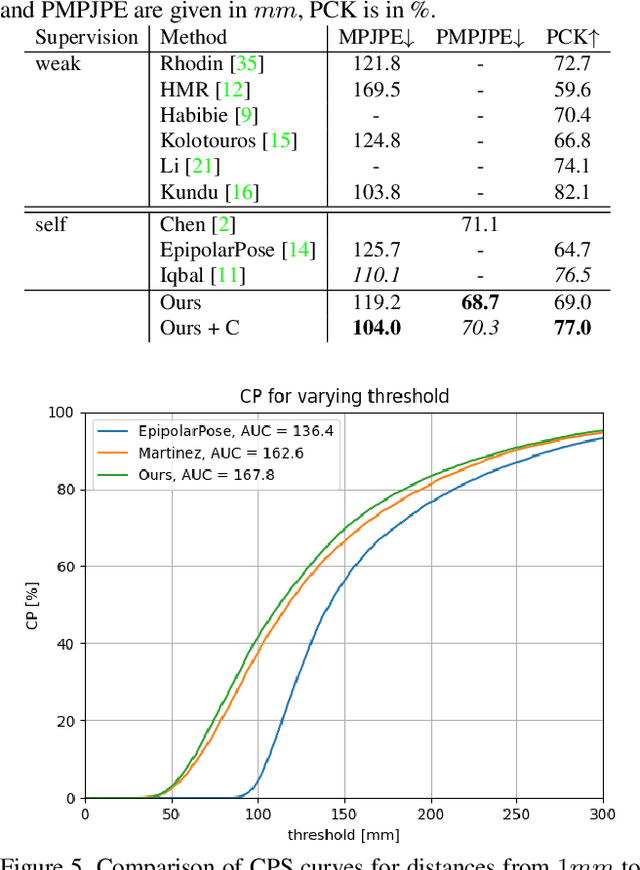
Human pose estimation from single images is a challenging problem in computer vision that requires large amounts of labeled training data to be solved accurately. Unfortunately, for many human activities (\eg outdoor sports) such training data does not exist and is hard or even impossible to acquire with traditional motion capture systems. We propose a self-supervised approach that learns a single image 3D pose estimator from unlabeled multi-view data. To this end, we exploit multi-view consistency constraints to disentangle the observed 2D pose into the underlying 3D pose and camera rotation. In contrast to most existing methods, we do not require calibrated cameras and can therefore learn from moving cameras. Nevertheless, in the case of a static camera setup, we present an optional extension to include constant relative camera rotations over multiple views into our framework. Key to the success are new, unbiased reconstruction objectives that mix information across views and training samples. The proposed approach is evaluated on two benchmark datasets (Human3.6M and MPII-INF-3DHP) and on the in-the-wild SkiPose dataset.
Weakly-supervised Learning of Human Dynamics
Jul 17, 2020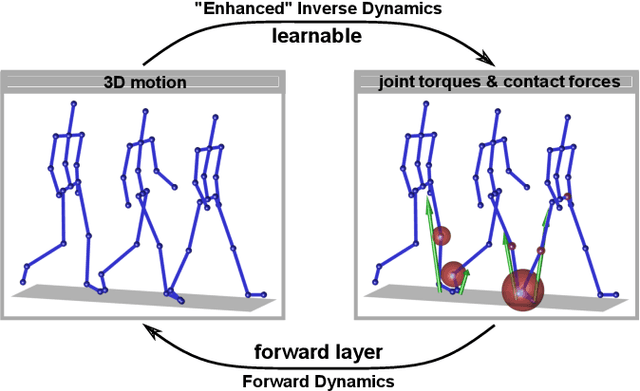
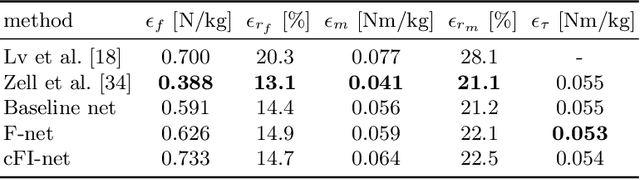
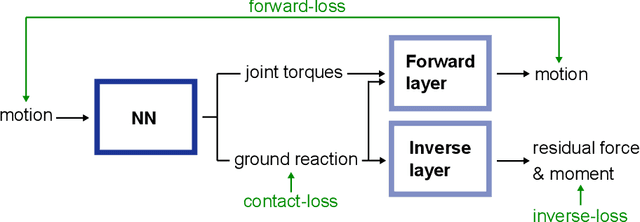
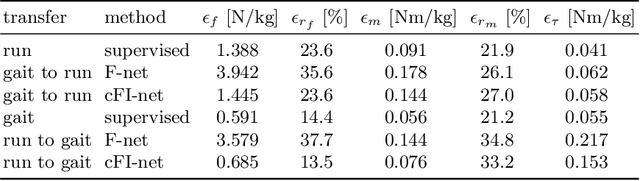
This paper proposes a weakly-supervised learning framework for dynamics estimation from human motion. Although there are many solutions to capture pure human motion readily available, their data is not sufficient to analyze quality and efficiency of movements. Instead, the forces and moments driving human motion (the dynamics) need to be considered. Since recording dynamics is a laborious task that requires expensive sensors and complex, time-consuming optimization, dynamics data sets are small compared to human motion data sets and are rarely made public. The proposed approach takes advantage of easily obtainable motion data which enables weakly-supervised learning on small dynamics sets and weakly-supervised domain transfer. Our method includes novel neural network (NN) layers for forward and inverse dynamics during end-to-end training. On this basis, a cyclic loss between pure motion data can be minimized, i.e. no ground truth forces and moments are required during training. The proposed method achieves state-of-the-art results in terms of ground reaction force, ground reaction moment and joint torque regression and is able to maintain good performance on substantially reduced sets.