 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePSB2: The Second Program Synthesis Benchmark Suite
Jun 10, 2021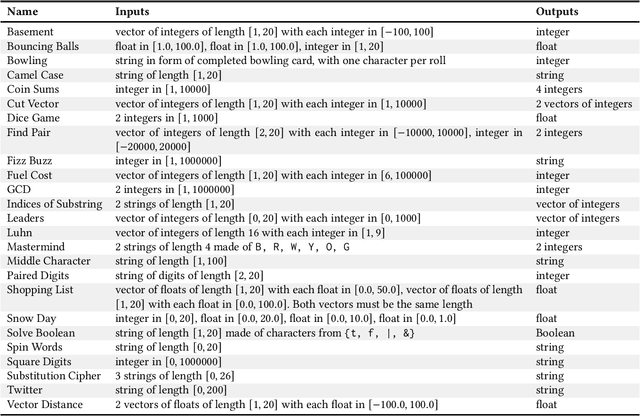
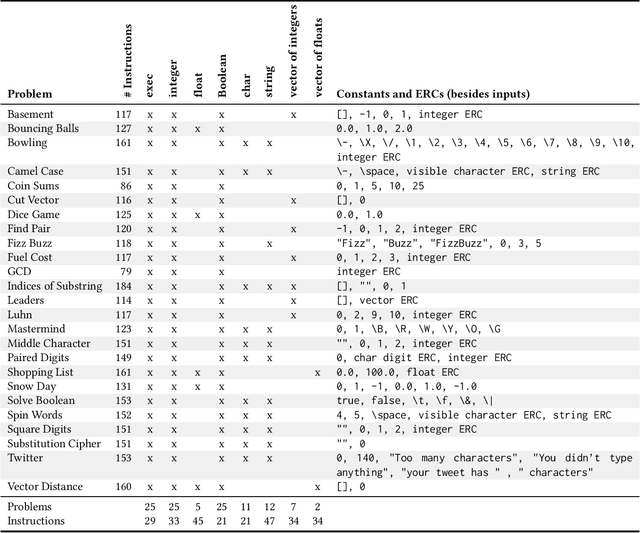
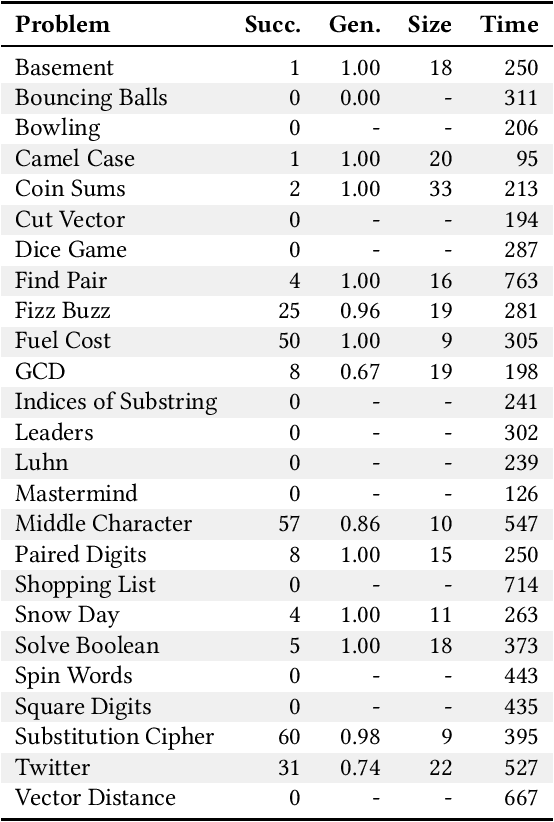
For the past six years, researchers in genetic programming and other program synthesis disciplines have used the General Program Synthesis Benchmark Suite to benchmark many aspects of automatic program synthesis systems. These problems have been used to make notable progress toward the goal of general program synthesis: automatically creating the types of software that human programmers code. Many of the systems that have attempted the problems in the original benchmark suite have used it to demonstrate performance improvements granted through new techniques. Over time, the suite has gradually become outdated, hindering the accurate measurement of further improvements. The field needs a new set of more difficult benchmark problems to move beyond what was previously possible. In this paper, we describe the 25 new general program synthesis benchmark problems that make up PSB2, a new benchmark suite. These problems are curated from a variety of sources, including programming katas and college courses. We selected these problems to be more difficult than those in the original suite, and give results using PushGP showing this increase in difficulty. These new problems give plenty of room for improvement, pointing the way for the next six or more years of general program synthesis research.
Generative Design of NU's Husky Carbon, A Morpho-Functional, Legged Robot
Apr 12, 2021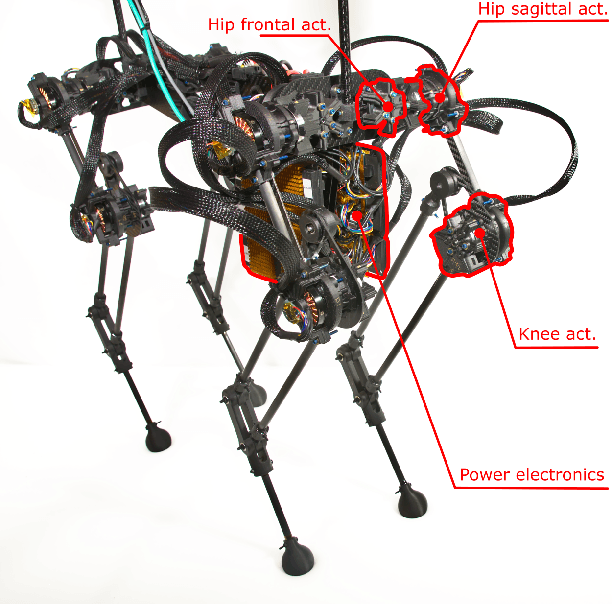



We report the design of a morpho-functional robot called Husky Carbon. Our goal is to integrate two forms of mobility, aerial and quadrupedal-legged locomotion, within a single platform. There are prohibitive design restrictions such as tight power budget and payload, which can particularly become important in aerial flights. To address these challenges, we pose a problem called the Mobility Value of Added Mass (MVAM) problem. In the MVAM problem, we attempt to allocate mass in our designs such that the energetic performance is affected the least. To solve the MVAM problem, we adopted a generative design approach using Grasshopper's evolutionary solver to synthesize a parametric design space for Husky. Then, this space was searched for the morphologies that could yield a minimized Total Cost Of Transport (TCOT) and payload. This approach revealed that a front-heavy quadrupedal robot can achieve a lower TCOT while retaining larger margins on allowable added mass to its design. Based on this framework Husky was built and tested as a front-heavy robot.