 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative Design of NU's Husky Carbon, A Morpho-Functional, Legged Robot
Apr 12, 2021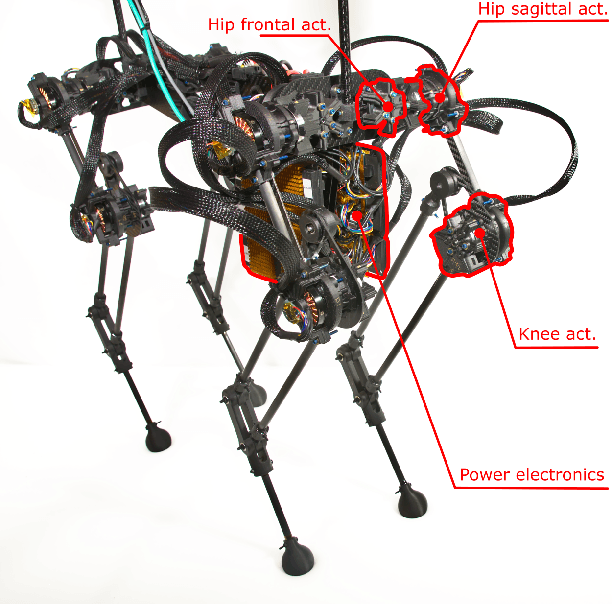



We report the design of a morpho-functional robot called Husky Carbon. Our goal is to integrate two forms of mobility, aerial and quadrupedal-legged locomotion, within a single platform. There are prohibitive design restrictions such as tight power budget and payload, which can particularly become important in aerial flights. To address these challenges, we pose a problem called the Mobility Value of Added Mass (MVAM) problem. In the MVAM problem, we attempt to allocate mass in our designs such that the energetic performance is affected the least. To solve the MVAM problem, we adopted a generative design approach using Grasshopper's evolutionary solver to synthesize a parametric design space for Husky. Then, this space was searched for the morphologies that could yield a minimized Total Cost Of Transport (TCOT) and payload. This approach revealed that a front-heavy quadrupedal robot can achieve a lower TCOT while retaining larger margins on allowable added mass to its design. Based on this framework Husky was built and tested as a front-heavy robot.
Rough-Terrain Locomotion and Unilateral Contact Force Regulations With a Multi-Modal Legged Robot
Mar 29, 2021



Despite many accomplishments by legged robot designers, state-of-the-art bipedal robots are prone to falling over, cannot negotiate extremely rough terrains and cannot directly regulate unilateral contact forces. Our objective is to integrate merits of legged and aerial robots in a single platform. We will show that the thrusters in a bipedal legged robot called Harpy can be leveraged to stabilize the robot's frontal dynamics and permit jumping over large obstacles which is an unusual capability not reported before. In addition, we will capitalize on the thrusters action in Harpy and will show that one can avoid using costly optimization-based schemes by directly regulating contact forces using an Reference Governor (RGs). We will resolve gait parameters and re-plan them during gait cycles by only assuming well-tuned supervisory controllers. Then, we will focus on RG-based fine-tuning of the joints desired trajectories to satisfy unilateral contact force constraints.
An Integrated Mechanical Intelligence and Control Approach Towards Flight Control of Aerobat
Mar 29, 2021



Our goal in this work is to expand the theory and practice of robot locomotion by addressing critical challenges associated with the robotic biomimicry of bat aerial locomotion. Bats are known for their pronounced, fast wing articulations, e.g., bats can mobilize as many as forty joints during a single wingbeat, with some joints reaching over one thousand degrees per second in angular speed. Copying bats flight is a significant ordeal, however, very rewarding. Aerial drones with morphing bodies similar to bats can be safer, agile and energy-efficient owing to their articulated and soft wings. Current design paradigms have failed to copy bat flight because they assume only closed-loop feedback roles and ignore computational roles carried out by morphology. To respond to the urgency, a design framework called Morphing via Integrated Mechanical Intelligence and Control (MIMIC) is proposed. In this paper, using the dynamic model of Northeastern University's Aerobat, which is designed to test the effectiveness of the MIMIC framework, it will be shown that computational structures and closed-loop feedback can be successfully used to mimic bats stable flight apparatus.
Mechanical design and fabrication of a kinetic sculpture with application to bioinspired drone design
Mar 29, 2021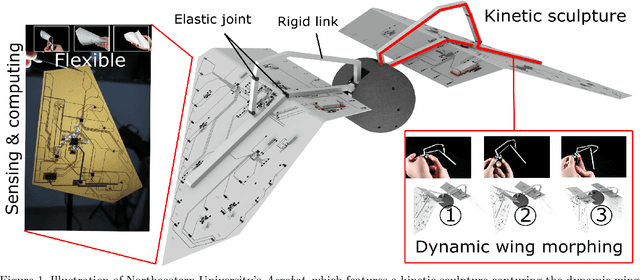
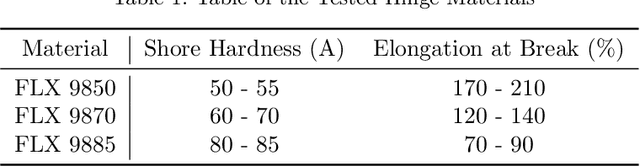
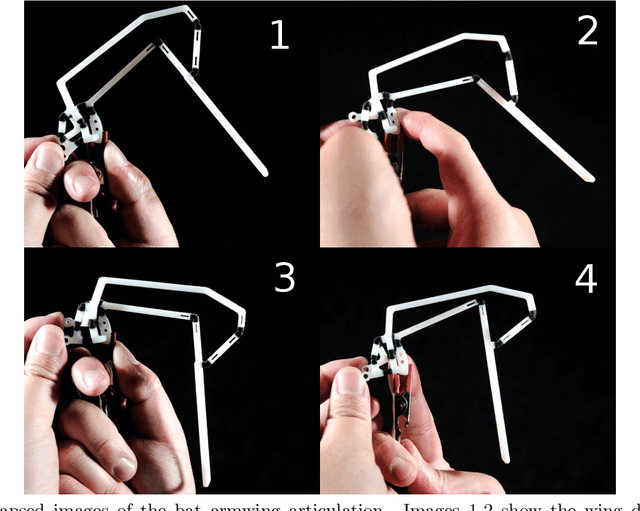
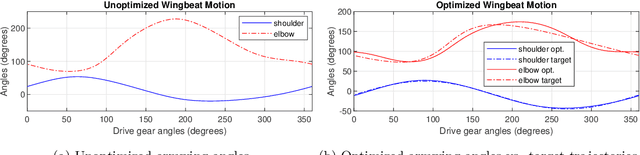
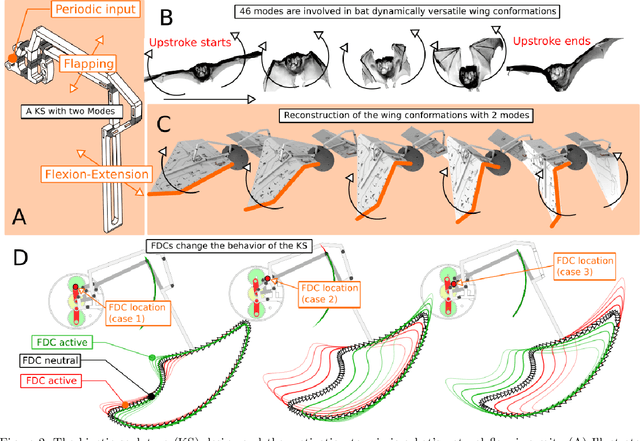
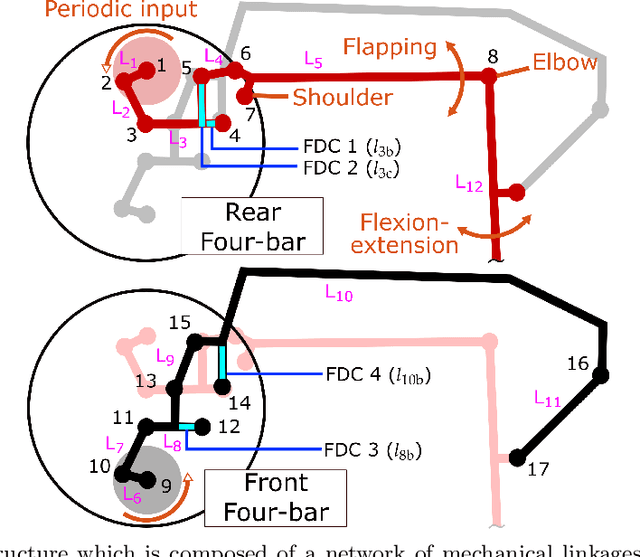
Biologically-inspired robots are a very interesting and difficult branch of robotics dues to its very rich dynamical and morphological complexities. Among them, flying animals, such as bats, have been among the most difficult to take inspiration from as they exhibit complex wing articulation. We attempt to capture several of the key degrees-of-freedom that are present in the natural flapping gait of a bat. In this work, we present the mechanical design and analysis of our flapping wing robot, the Aerobat, where we capture the plunging and flexion-extension in the bat's flapping modes. This robot utilizes gears, cranks, and four-bar linkage mechanisms to actuate the arm-wing structure composed of rigid and flexible components monolithically fabricated using PolyJet 3D printing. The resulting robot exhibits wing expansion and retraction during the downstroke and upstroke respectively which minimizes the negative lift and results in a more efficient flapping gait.
Orientation stabilization in a bioinspired bat-robot using integrated mechanical intelligence and control
Mar 29, 2021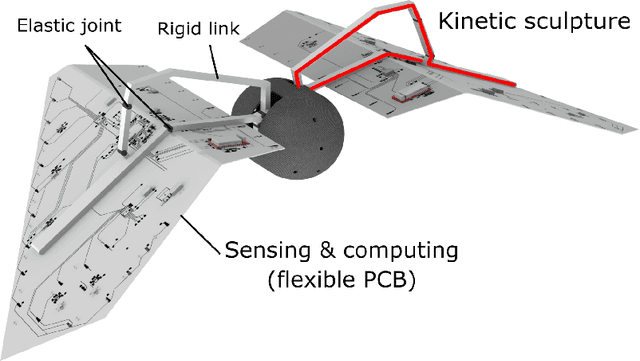
Our goal in this work is to expand the theory and practice of robot locomotion by addressing critical challenges associated with the robotic biomimicry of bat aerial locomotion. Bats wings exhibit fast wing articulation and can mobilize as many as 40 joints within a single wingbeat. Mimicking bat flight can be a significant ordeal and the current design paradigms have failed as they assume only closed-loop feedback roles through sensors and conventional actuators while ignoring the computational role carried by morphology. In this paper, we propose a design framework called Morphing via Integrated Mechanical Intelligence and Control (MIMIC) which integrates small and low energy actuators to control the robot through a change in morphology. In this paper, using the dynamic model of Northeastern University's Aerobat, which is designed to test the effectiveness of the MIMIC framework, it will be shown that computational structures and closed-loop feedback can be successfully used to mimic bats stable flight apparatus.