 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMechanical design and fabrication of a kinetic sculpture with application to bioinspired drone design
Mar 29, 2021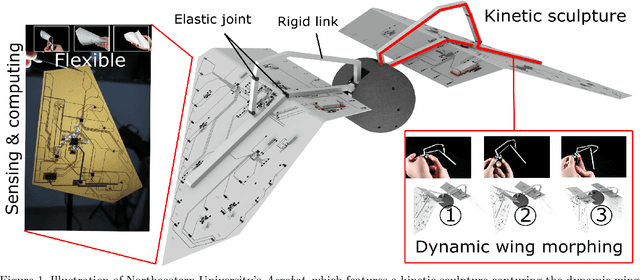
Biologically-inspired robots are a very interesting and difficult branch of robotics dues to its very rich dynamical and morphological complexities. Among them, flying animals, such as bats, have been among the most difficult to take inspiration from as they exhibit complex wing articulation. We attempt to capture several of the key degrees-of-freedom that are present in the natural flapping gait of a bat. In this work, we present the mechanical design and analysis of our flapping wing robot, the Aerobat, where we capture the plunging and flexion-extension in the bat's flapping modes. This robot utilizes gears, cranks, and four-bar linkage mechanisms to actuate the arm-wing structure composed of rigid and flexible components monolithically fabricated using PolyJet 3D printing. The resulting robot exhibits wing expansion and retraction during the downstroke and upstroke respectively which minimizes the negative lift and results in a more efficient flapping gait.
Orientation stabilization in a bioinspired bat-robot using integrated mechanical intelligence and control
Mar 29, 2021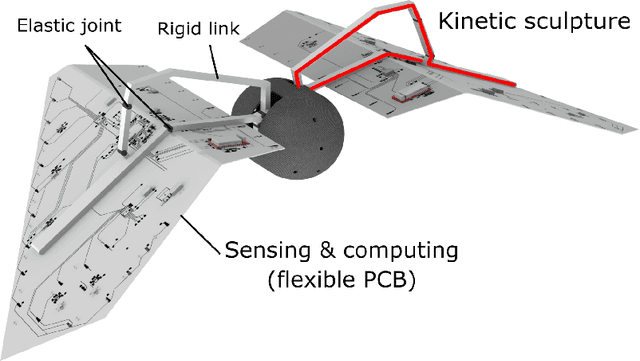
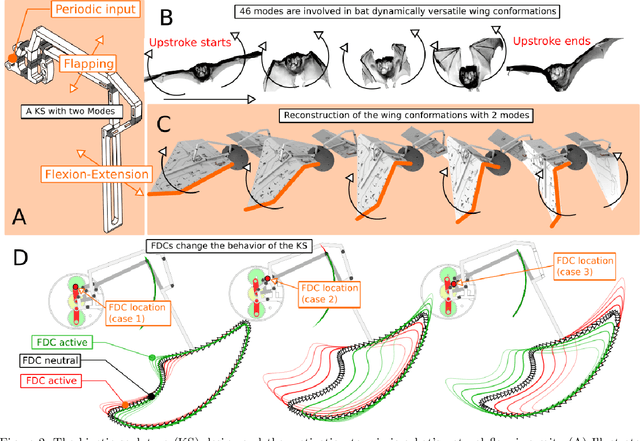
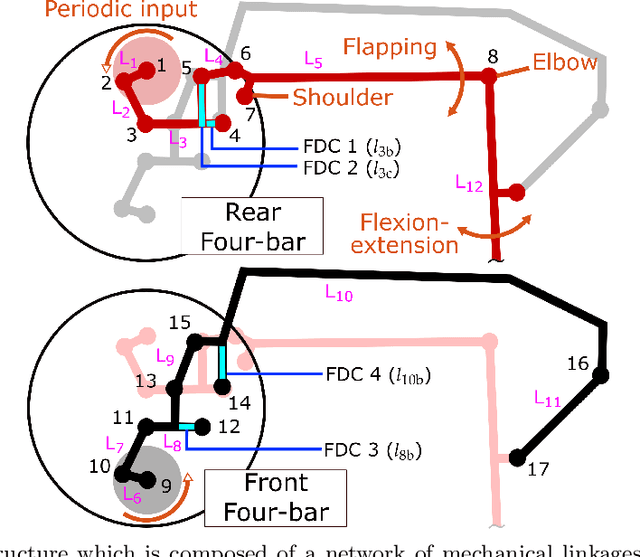
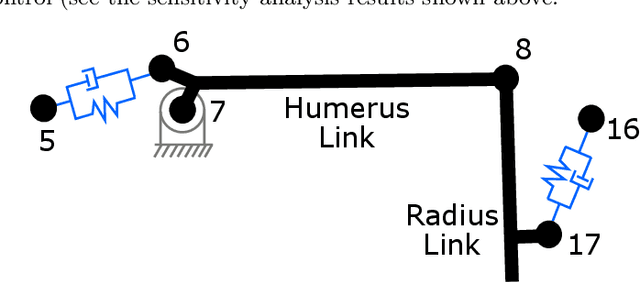
Our goal in this work is to expand the theory and practice of robot locomotion by addressing critical challenges associated with the robotic biomimicry of bat aerial locomotion. Bats wings exhibit fast wing articulation and can mobilize as many as 40 joints within a single wingbeat. Mimicking bat flight can be a significant ordeal and the current design paradigms have failed as they assume only closed-loop feedback roles through sensors and conventional actuators while ignoring the computational role carried by morphology. In this paper, we propose a design framework called Morphing via Integrated Mechanical Intelligence and Control (MIMIC) which integrates small and low energy actuators to control the robot through a change in morphology. In this paper, using the dynamic model of Northeastern University's Aerobat, which is designed to test the effectiveness of the MIMIC framework, it will be shown that computational structures and closed-loop feedback can be successfully used to mimic bats stable flight apparatus.