 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulating Malicious Attacks on VANETs for Connected and Autonomous Vehicle Cybersecurity: A Machine Learning Dataset
Feb 15, 2022
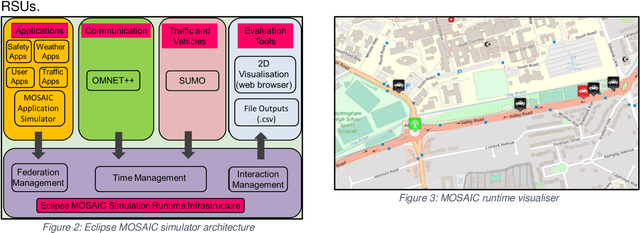
Connected and Autonomous Vehicles (CAVs) rely on Vehicular Adhoc Networks with wireless communication between vehicles and roadside infrastructure to support safe operation. However, cybersecurity attacks pose a threat to VANETs and the safe operation of CAVs. This study proposes the use of simulation for modelling typical communication scenarios which may be subject to malicious attacks. The Eclipse MOSAIC simulation framework is used to model two typical road scenarios, including messaging between the vehicles and infrastructure - and both replay and bogus information cybersecurity attacks are introduced. The model demonstrates the impact of these attacks, and provides an open dataset to inform the development of machine learning algorithms to provide anomaly detection and mitigation solutions for enhancing secure communications and safe deployment of CAVs on the road.
Crowdsourcing On-street Parking Space Detection
Mar 01, 2016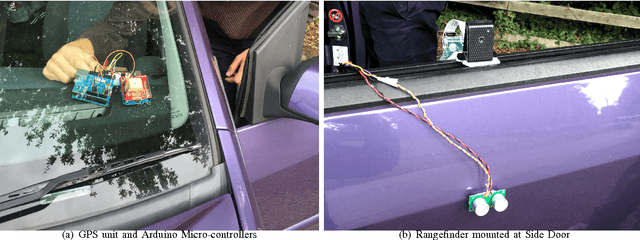
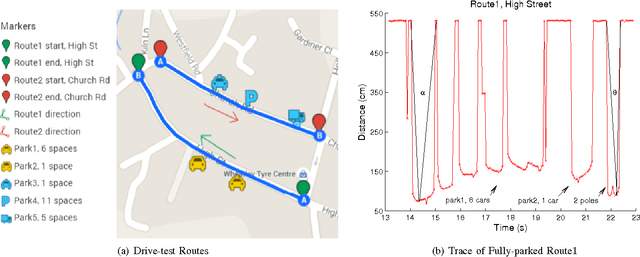

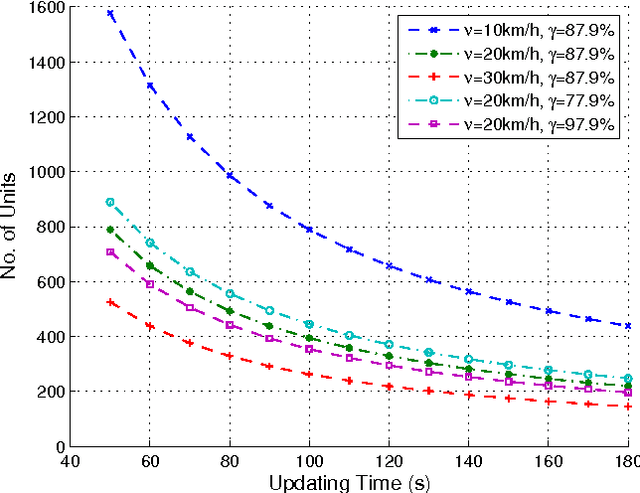
As the number of vehicles continues to grow, parking spaces are at a premium in city streets. Additionally, due to the lack of knowledge about street parking spaces, heuristic circling the blocks not only costs drivers' time and fuel, but also increases city congestion. In the wake of recent trend to build convenient, green and energy-efficient smart cities, we rethink common techniques adopted by high-profile smart parking systems, and present a user-engaged (crowdsourcing) and sonar-based prototype to identify urban on-street parking spaces. The prototype includes an ultrasonic sensor, a GPS receiver and associated Arduino micro-controllers. It is mounted on the passenger side of a car to measure the distance from the vehicle to the nearest roadside obstacle. Multiple road tests are conducted around Wheatley, Oxford to gather results and emulate the crowdsourcing approach. By extracting parked vehicles' features from the collected trace, a supervised learning algorithm is developed to estimate roadside parking occupancy and spot illegal parking vehicles. A quantity estimation model is derived to calculate the required number of sensing units to cover urban streets. The estimation is quantitatively compared to a fixed sensing solution. The results show that the crowdsourcing way would need substantially fewer sensors compared to the fixed sensing system.