 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic self-contained calibration of an industrial dual-arm robot with cameras using self-contact, planar constraints, and self-observation
Dec 14, 2020
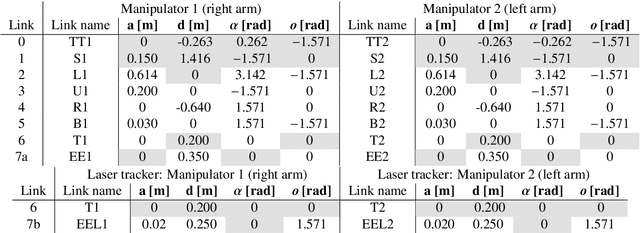


We present a robot kinematic calibration method that combines complementary calibration approaches: self-contact, planar constraints, and self-observation. We analyze the estimation of the end effector parameters, joint offsets of the manipulators, calibration of the complete kinematic chain (DH parameters), and we compare our results with ground truth measurements provided by a laser tracker. Our main findings are: (1) When applying the complementary calibration approaches in isolation, the self-contact approach yields the best and most stable results. (2) All combinations of more than one approach were always superior to using any single approach in terms of calibration errors as well as the observability of the estimated parameters. Combining more approaches delivers robot parameters that better generalize to the parts of workspace not used for the calibration. (3) Sequential calibration, i.e.\ calibrating cameras first and then robot kinematics, is more effective than simultaneous calibration of all parameters. In real experiments, we employ two industrial manipulators mounted on a common base. The manipulators are equipped with force/torque sensors at their wrists, with two cameras attached to the robot base, and with special end effectors with fiducial markers. We collect a new comprehensive dataset for robot kinematic calibration and make it publicly available. The dataset and its analysis provide quantitative and qualitative insights that go beyond the specific manipulators used in this work and are applicable to self-contained robot kinematic calibration in general.