 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Unified Control Architecture for Macro-Micro Manipulation using a Active Remote Center of Compliance for Manufacturing Applications
Feb 02, 2026Macro-micro manipulators combine a macro manipulator with a large workspace, such as an industrial robot, with a lightweight, high-bandwidth micro manipulator. This enables highly dynamic interaction control while preserving the wide workspace of the robot. Traditionally, position control is assigned to the macro manipulator, while the micro manipulator handles the interaction with the environment, limiting the achievable interaction control bandwidth. To solve this, we propose a novel control architecture that incorporates the macro manipulator into the active interaction control. This leads to a increase in control bandwidth by a factor of 2.1 compared to the state of the art architecture, based on the leader-follower approach and factor 12.5 compared to traditional robot-based force control. Further we propose surrogate models for a more efficient controller design and easy adaptation to hardware changes. We validate our approach by comparing it against the other control schemes in different experiments, like collision with an object, following a force trajectory and industrial assembly tasks.
Highly dynamic physical interaction for robotics: design and control of an active remote center of compliance
Sep 16, 2024



Robot interaction control is often limited to low dynamics or low flexibility, depending on whether an active or passive approach is chosen. In this work, we introduce a hybrid control scheme that combines the advantages of active and passive interaction control. To accomplish this, we propose the design of a novel Active Remote Center of Compliance (ARCC), which is based on a passive and active element which can be used to directly control the interaction forces. We introduce surrogate models for a dynamic comparison against purely robot-based interaction schemes. In a comparative validation, ARCC drastically improves the interaction dynamics, leading to an increase in the motion bandwidth of up to 31 times. We introduce further our control approach as well as the integration in the robot controller. Finally, we analyze ARCC on different industrial benchmarks like peg-in-hole, top-hat rail assembly and contour following problems and compare it against the state of the art, to highlight the dynamic and flexibility. The proposed system is especially suited if the application requires a low cycle time combined with a sensitive manipulation.
Upside down: affordable high-performance motion platform
Mar 31, 2023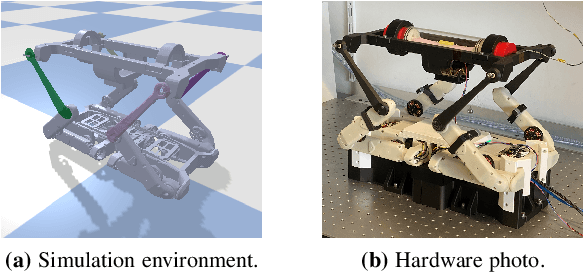
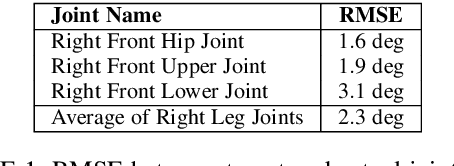
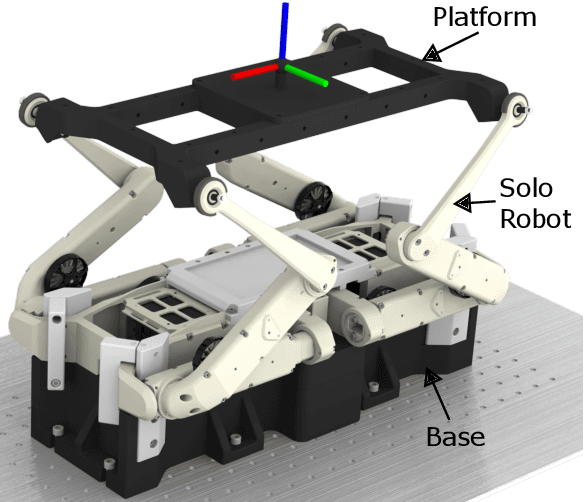

Parallel robots are capable of high-speed manipulation and have become essential tools in the industry. The proximal placement of their motors and the low weight of their end effectors make them ideal for generating highly dynamic motion. Therefore, parallel robots can be adopted for motion platform designs, as long as end effector loads are low. Traditional motion platforms can be large and powerful to generate multiple g acceleration. However, these designs tend to be expensive and large. Similar but smaller motion platforms feature a small work range with reduced degrees of freedom (DoFs) and a limited payload. Here we seek a medium-sized affordable parallel robot capable of powerful and high-speed 6-DoF motion in a comparably large workspace. This work explores the concept of a quadruped robot flipped upside-down, with the motion platform fixed between its feet. In particular, we exploit the high-power dynamic brushless actuation and the four-leg redundancy when moving the motion platform. We characterize the resulting motion platform by tracking sinusoidal and circular trajectories with varying loads. Dynamic motions in 6 DoFs up to 10 Hz and ~10 mm amplitude are possible when moving a mass of 300 grams. We demonstrate single-axis end-effector translations up to ~20 mm at 10 Hz for higher loads of 1.2 kg. The motion platform can be replicated easily by 3D printing and off-the-shelf components. All motion platform-related hardware and the custom-written software required to replicate are open-source.