 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrip Recovery in Lower-Limb Prostheses using Reachable Sets of Predicted Human Motion
Oct 21, 2020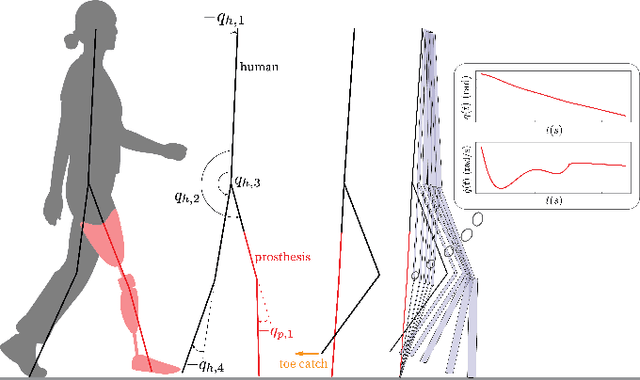
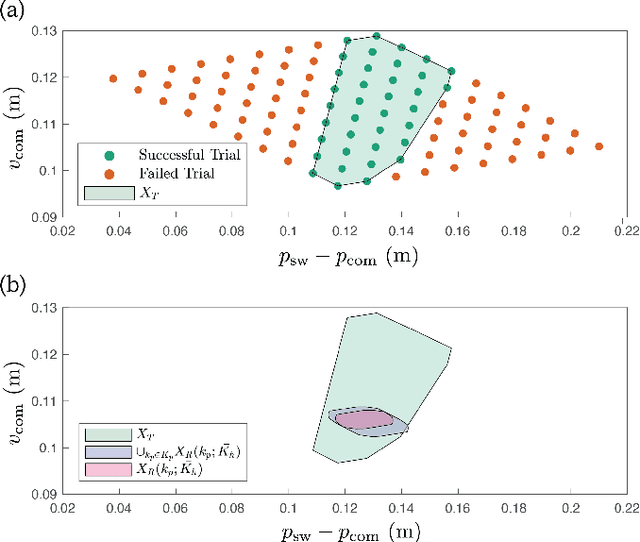
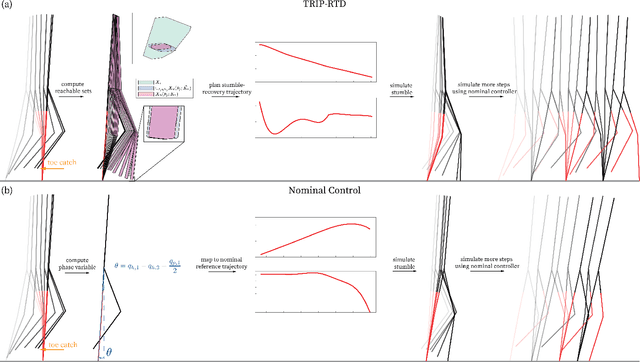
People with lower-limb loss, the majority of which use passive prostheses, exhibit a high incidence of falls each year. Powered lower-limb prostheses have the potential to reduce fall rates by actively helping the user recover from a stumble, but the unpredictability of the human response makes it difficult to design controllers that ensure a successful recovery. This paper presents a method called TRIP-RTD (Trip Recovery in Prostheses via Reachability-based Trajectory Design) for online trajectory planning in a knee prosthesis during and after a stumble that can accommodate a set of possible predictions of human behavior. Using this predicted set of human behavior, the proposed method computes a parameterized reachable set of trajectories for the human-prosthesis system. To ensure safety at run-time, TRIP-RTD selects a trajectory for the prosthesis that guarantees that all possible states of the human-prosthesis system at touchdown arrive in the basin of attraction of the nominal behavior of the system. In simulated stumble experiments where a nominal phase-based controller was unable to help the system recover, TRIP-RTD produced trajectories in under 101 ms that led to successful recoveries for all feasible solutions found.
Automated Camera-Based Estimation of Rehabilitation Criteria Following ACL Reconstruction
Oct 25, 2018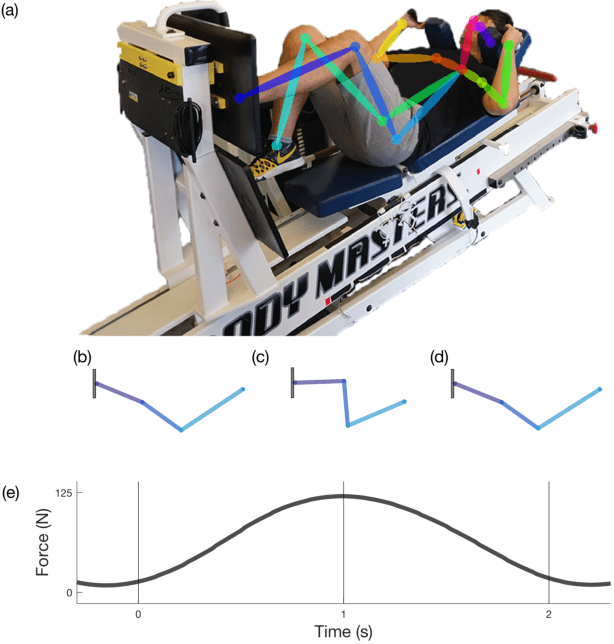
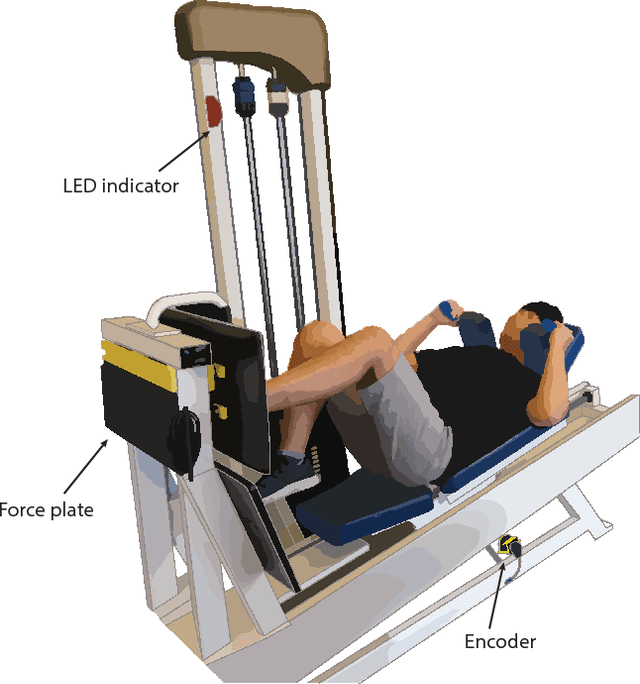
Anterior cruciate ligament (ACL) reconstruction necessitates months of rehabilitation, during which a clinician evaluates whether a patient is ready to return to sports or occupation. Due to their time- and cost-intensive nature, these screenings to assess progress are unavailable to many. This paper introduces an automated, markerless, camera-based method for estimating rehabilitation criteria following ACL reconstruction. To evaluate the performance of this novel technique, data were collected weekly from 12 subjects as they used a leg press over the course of a 12-week rehabilitation period. The proposed camera-based method for estimating displacement and force was compared to encoder and force plate measurements. The leg press displacement and force values were estimated with 89.7% and 85.3% accuracy, respectively. These values were then used to calculate lower-limb symmetry and to track patient progress over time.