 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePractical Comparison of Optimization Algorithms for Learning-Based MPC with Linear Models
Apr 10, 2014
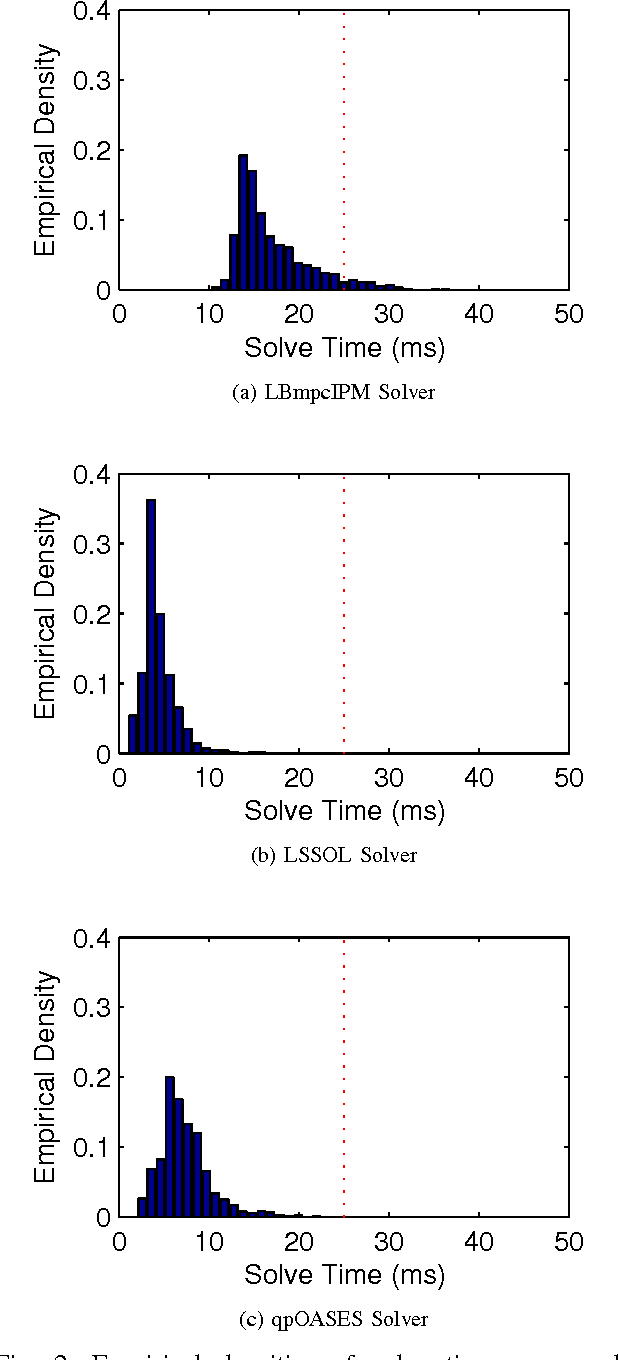
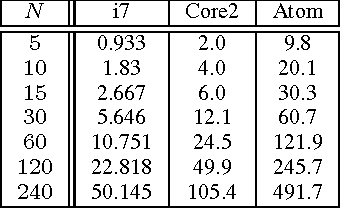

Learning-based control methods are an attractive approach for addressing performance and efficiency challenges in robotics and automation systems. One such technique that has found application in these domains is learning-based model predictive control (LBMPC). An important novelty of LBMPC lies in the fact that its robustness and stability properties are independent of the type of online learning used. This allows the use of advanced statistical or machine learning methods to provide the adaptation for the controller. This paper is concerned with providing practical comparisons of different optimization algorithms for implementing the LBMPC method, for the special case where the dynamic model of the system is linear and the online learning provides linear updates to the dynamic model. For comparison purposes, we have implemented a primal-dual infeasible start interior point method that exploits the sparsity structure of LBMPC. Our open source implementation (called LBmpcIPM) is available through a BSD license and is provided freely to enable the rapid implementation of LBMPC on other platforms. This solver is compared to the dense active set solvers LSSOL and qpOASES using a quadrotor helicopter platform. Two scenarios are considered: The first is a simulation comparing hovering control for the quadrotor, and the second is on-board control experiments of dynamic quadrotor flight. Though the LBmpcIPM method has better asymptotic computational complexity than LSSOL and qpOASES, we find that for certain integrated systems (like our quadrotor testbed) these methods can outperform LBmpcIPM. This suggests that actual benchmarks should be used when choosing which algorithm is used to implement LBMPC on practical systems.