 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Decision Tree Ensembles for Energy-Efficient Inference on IoT Edge Nodes
Jun 16, 2023



With the increasing popularity of Internet of Things (IoT) devices, there is a growing need for energy-efficient Machine Learning (ML) models that can run on constrained edge nodes. Decision tree ensembles, such as Random Forests (RFs) and Gradient Boosting (GBTs), are particularly suited for this task, given their relatively low complexity compared to other alternatives. However, their inference time and energy costs are still significant for edge hardware. Given that said costs grow linearly with the ensemble size, this paper proposes the use of dynamic ensembles, that adjust the number of executed trees based both on a latency/energy target and on the complexity of the processed input, to trade-off computational cost and accuracy. We focus on deploying these algorithms on multi-core low-power IoT devices, designing a tool that automatically converts a Python ensemble into optimized C code, and exploring several optimizations that account for the available parallelism and memory hierarchy. We extensively benchmark both static and dynamic RFs and GBTs on three state-of-the-art IoT-relevant datasets, using an 8-core ultra-lowpower System-on-Chip (SoC), GAP8, as the target platform. Thanks to the proposed early-stopping mechanisms, we achieve an energy reduction of up to 37.9% with respect to static GBTs (8.82 uJ vs 14.20 uJ per inference) and 41.7% with respect to static RFs (2.86 uJ vs 4.90 uJ per inference), without losing accuracy compared to the static model.
Comparing State-of-the-Art and Emerging Augmented Reality Interfaces for Autonomous Vehicle-to-Pedestrian Communication
Feb 04, 2021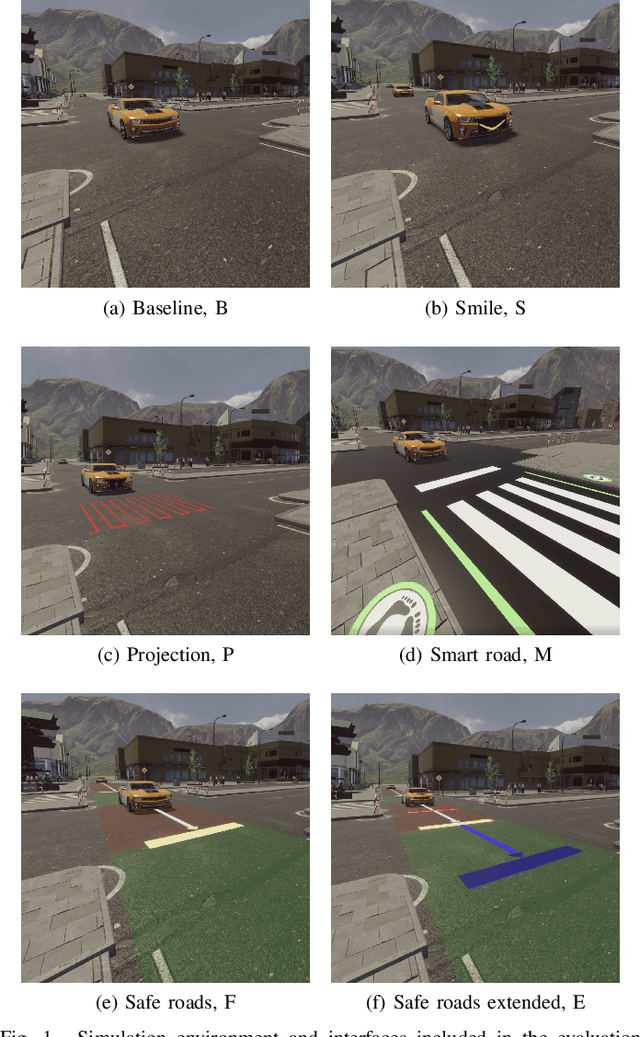
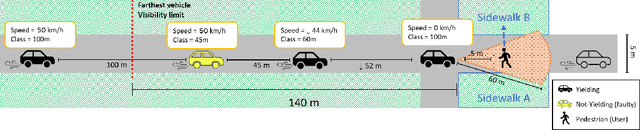
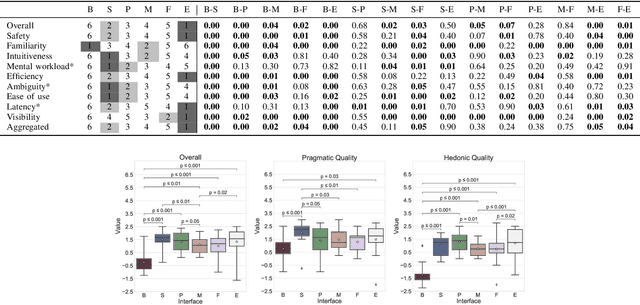
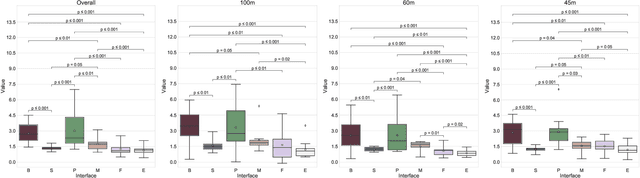
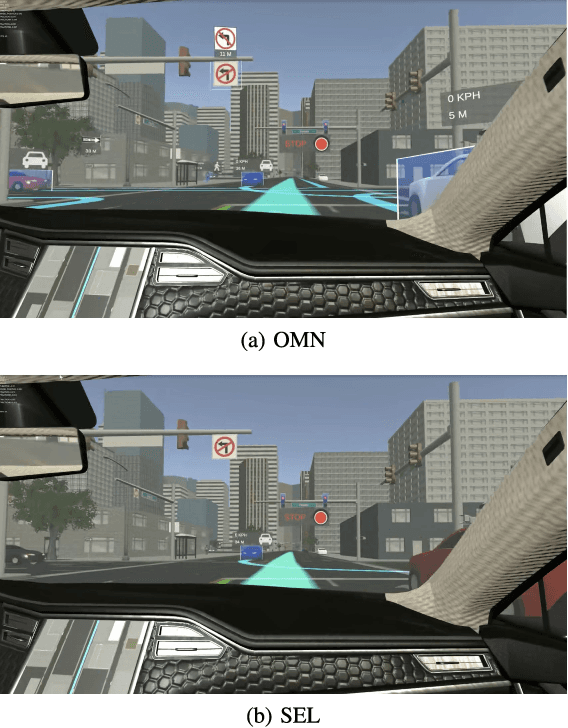
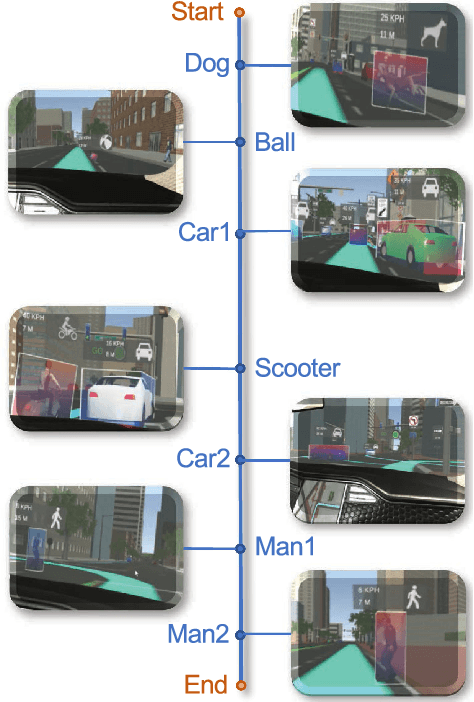
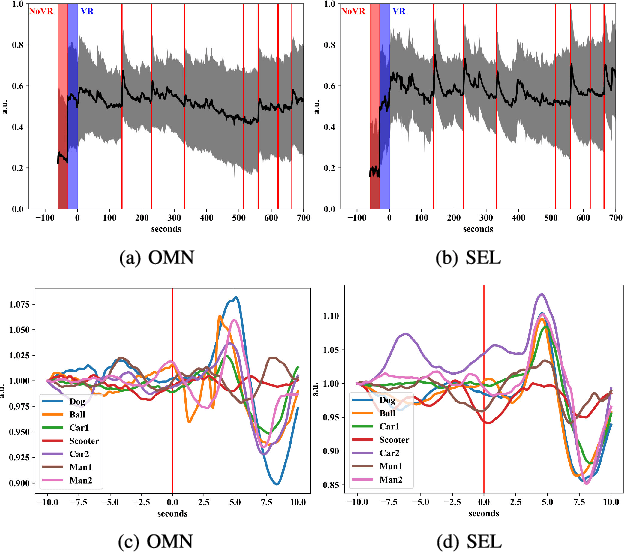
Providing pedestrians and other vulnerable road users with a clear indication about a fully autonomous vehicle status and intentions is crucial to make them coexist. In the last few years, a variety of external interfaces have been proposed, leveraging different paradigms and technologies including vehicle-mounted devices (like LED panels), short-range on-road projections, and road infrastructure interfaces (e.g., special asphalts with embedded displays). These designs were experimented in different settings, using mockups, specially prepared vehicles, or virtual environments, with heterogeneous evaluation metrics. Promising interfaces based on Augmented Reality (AR) have been proposed too, but their usability and effectiveness have not been tested yet. This paper aims to complement such body of literature by presenting a comparison of state-of-the-art interfaces and new designs under common conditions. To this aim, an immersive Virtual Reality-based simulation was developed, recreating a well-known scenario represented by pedestrians crossing in urban environments under non-regulated conditions. A user study was then performed to investigate the various dimensions of vehicle-to-pedestrian interaction leveraging objective and subjective metrics. Even though no interface clearly stood out over all the considered dimensions, one of the AR designs achieved state-of-the-art results in terms of safety and trust, at the cost of higher cognitive effort and lower intuitiveness compared to LED panels showing anthropomorphic features. Together with rankings on the various dimensions, indications about advantages and drawbacks of the various alternatives that emerged from this study could provide important information for next developments in the field.
Building Trust in Autonomous Vehicles: Role of Virtual Reality Driving Simulators in HMI Design
Jul 27, 2020
The investigation of factors contributing at making humans trust Autonomous Vehicles (AVs) will play a fundamental role in the adoption of such technology. The user's ability to form a mental model of the AV, which is crucial to establish trust, depends on effective user-vehicle communication; thus, the importance of Human-Machine Interaction (HMI) is poised to increase. In this work, we propose a methodology to validate the user experience in AVs based on continuous, objective information gathered from physiological signals, while the user is immersed in a Virtual Reality-based driving simulation. We applied this methodology to the design of a head-up display interface delivering visual cues about the vehicle' sensory and planning systems. Through this approach, we obtained qualitative and quantitative evidence that a complete picture of the vehicle's surrounding, despite the higher cognitive load, is conducive to a less stressful experience. Moreover, after having been exposed to a more informative interface, users involved in the study were also more willing to test a real AV. The proposed methodology could be extended by adjusting the simulation environment, the HMI and/or the vehicle's Artificial Intelligence modules to dig into other aspects of the user experience.