 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Episodic Memory-based Exploration
May 18, 2024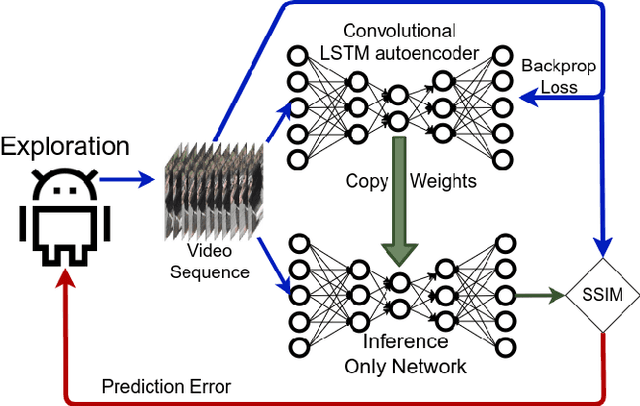
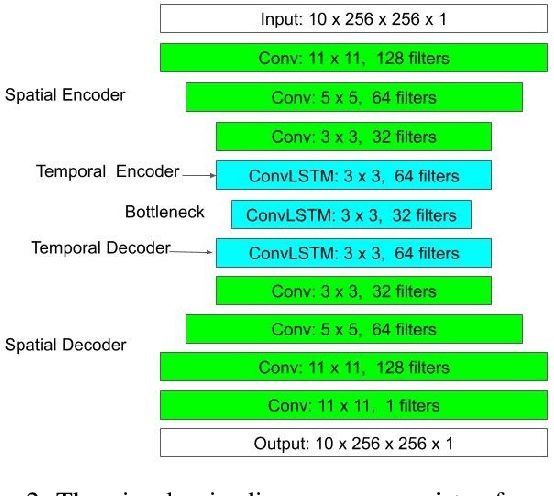
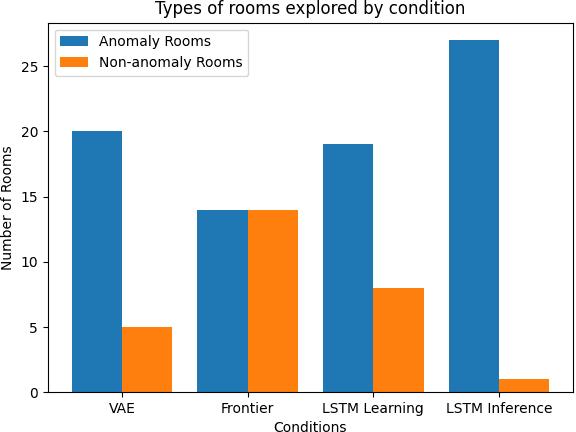
In humans, intrinsic motivation is an important mechanism for open-ended cognitive development; in robots, it has been shown to be valuable for exploration. An important aspect of human cognitive development is $\textit{episodic memory}$ which enables both the recollection of events from the past and the projection of subjective future. This paper explores the use of visual episodic memory as a source of intrinsic motivation for robotic exploration problems. Using a convolutional recurrent neural network autoencoder, the agent learns an efficient representation for spatiotemporal features such that accurate sequence prediction can only happen once spatiotemporal features have been learned. Structural similarity between ground truth and autoencoder generated images is used as an intrinsic motivation signal to guide exploration. Our proposed episodic memory model also implicitly accounts for the agent's actions, motivating the robot to seek new interactive experiences rather than just areas that are visually dissimilar. When guiding robotic exploration, our proposed method outperforms the Curiosity-driven Variational Autoencoder (CVAE) at finding dynamic anomalies.
* FLAIRS 2023, 7 pages, 11 figures
Leveraging Evolutionary Algorithms for Feasible Hexapod Locomotion Across Uneven Terrain
Mar 29, 2022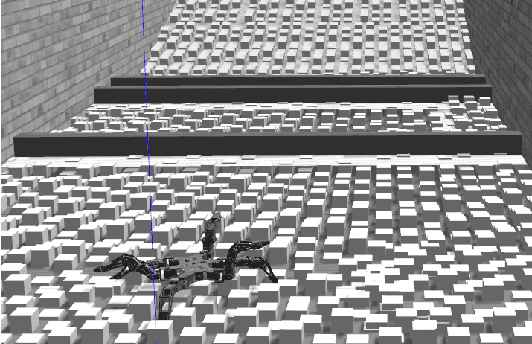
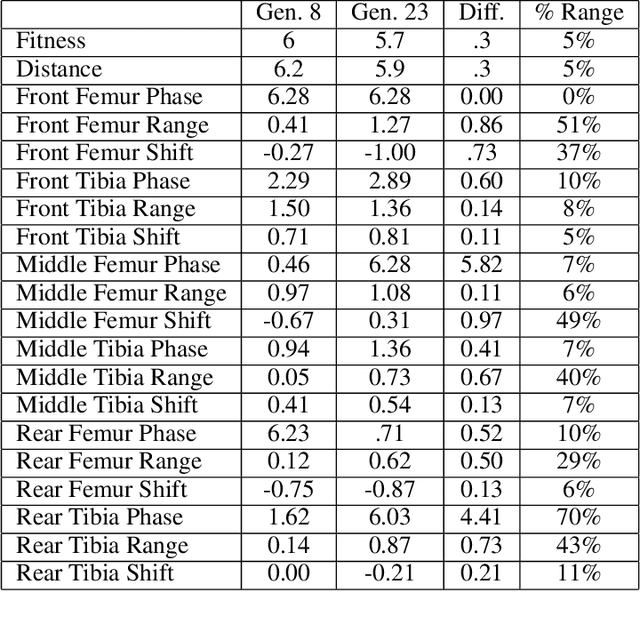
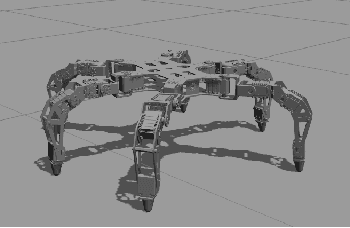
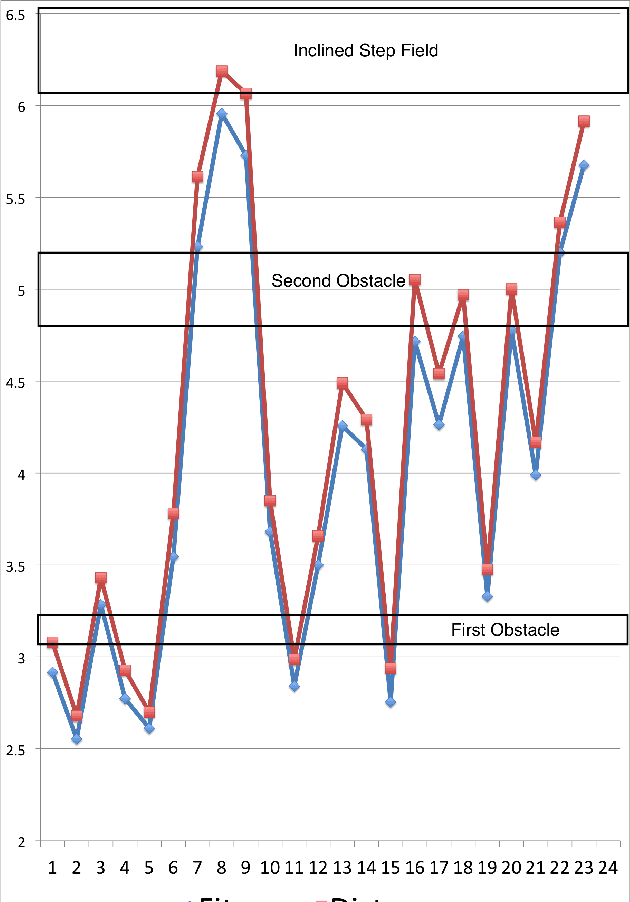
Optimizing gait stability for legged robots is a difficult problem. Even on level surfaces, effectively traversing across different textures (e.g., carpet) rests on dynamically tuning parameters in multidimensional space. Inspired by biology, evolutionary algorithms (EA) remain an attractive solution for feasibly implementing robotic locomotion with both energetic economy and rapid parameter convergence. Here, we leveraged this class of algorithms to evolve a stable hexapod gait controller capable of traversing uneven terrain and obstacles. Gait parameters were evolved in a rigid body dynamics simulation on an 8 x 3 meter obstacle course comprised of random step field, linear obstacles and inclined surfaces. Using a fitness function that jointly optimized locomotion velocity and stability, we found that multiple successful gait parameter evolutions yielded specialized functionality for each leg. Specific gait parameters were identified as critical to developing a rough terrain gait.
On the Similarity of Deep Learning Representations Across Didactic and Adversarial Examples
Feb 17, 2020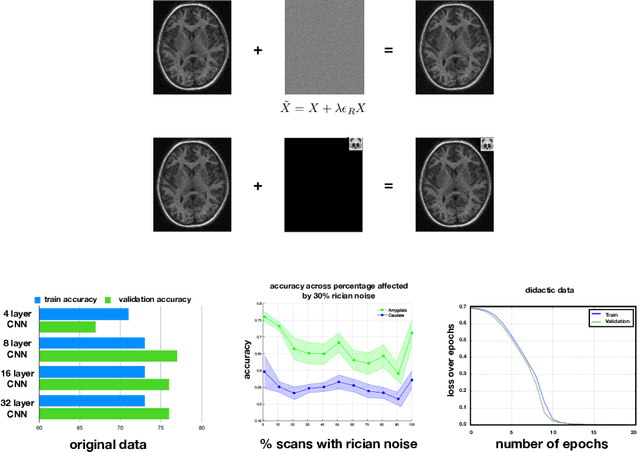
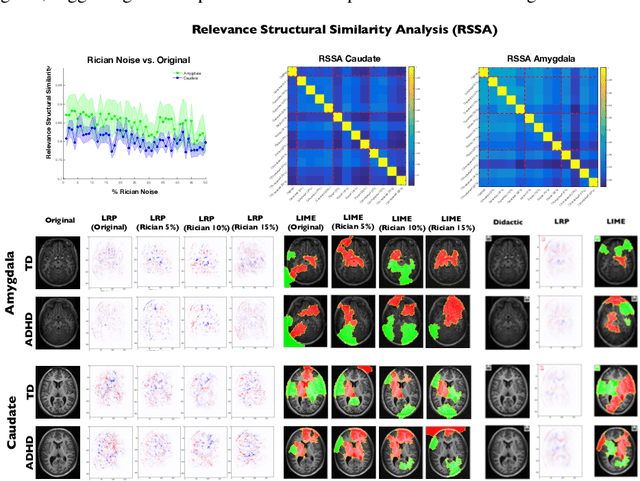
The increasing use of deep neural networks (DNNs) has motivated a parallel endeavor: the design of adversaries that profit from successful misclassifications. However, not all adversarial examples are crafted for malicious purposes. For example, real world systems often contain physical, temporal, and sampling variability across instrumentation. Adversarial examples in the wild may inadvertently prove deleterious for accurate predictive modeling. Conversely, naturally occurring covariance of image features may serve didactic purposes. Here, we studied the stability of deep learning representations for neuroimaging classification across didactic and adversarial conditions characteristic of MRI acquisition variability. We show that representational similarity and performance vary according to the frequency of adversarial examples in the input space.
* 2 figures
Decoding the Encoding of Functional Brain Networks: an fMRI Classification Comparison of Non-negative Matrix Factorization (NMF), Independent Component Analysis (ICA), and Sparse Coding Algorithms
Jul 01, 2016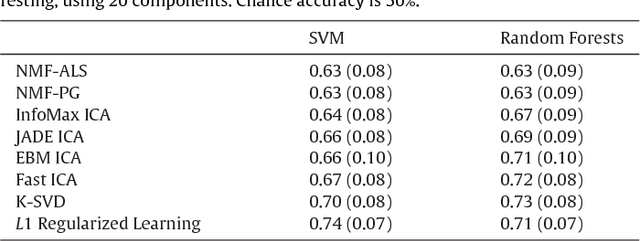
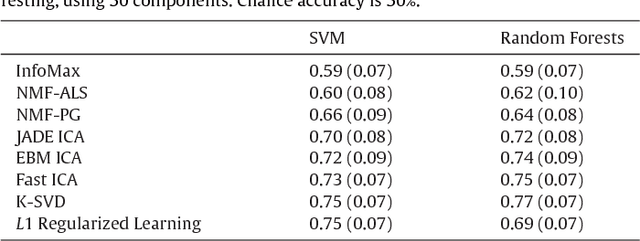
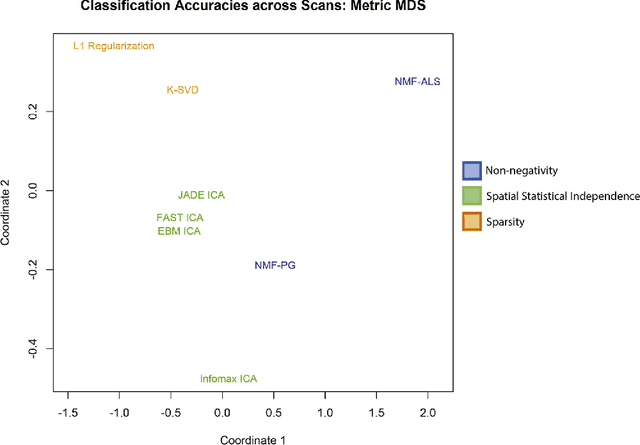
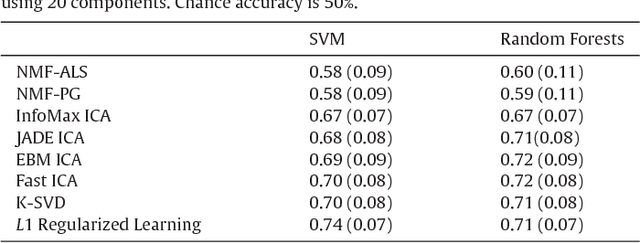
Brain networks in fMRI are typically identified using spatial independent component analysis (ICA), yet mathematical constraints such as sparse coding and positivity both provide alternate biologically-plausible frameworks for generating brain networks. Non-negative Matrix Factorization (NMF) would suppress negative BOLD signal by enforcing positivity. Spatial sparse coding algorithms ($L1$ Regularized Learning and K-SVD) would impose local specialization and a discouragement of multitasking, where the total observed activity in a single voxel originates from a restricted number of possible brain networks. The assumptions of independence, positivity, and sparsity to encode task-related brain networks are compared; the resulting brain networks for different constraints are used as basis functions to encode the observed functional activity at a given time point. These encodings are decoded using machine learning to compare both the algorithms and their assumptions, using the time series weights to predict whether a subject is viewing a video, listening to an audio cue, or at rest, in 304 fMRI scans from 51 subjects. For classifying cognitive activity, the sparse coding algorithm of $L1$ Regularized Learning consistently outperformed 4 variations of ICA across different numbers of networks and noise levels (p$<$0.001). The NMF algorithms, which suppressed negative BOLD signal, had the poorest accuracy. Within each algorithm, encodings using sparser spatial networks (containing more zero-valued voxels) had higher classification accuracy (p$<$0.001). The success of sparse coding algorithms may suggest that algorithms which enforce sparse coding, discourage multitasking, and promote local specialization may capture better the underlying source processes than those which allow inexhaustible local processes such as ICA.