 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Episodic Memory-based Exploration
May 18, 2024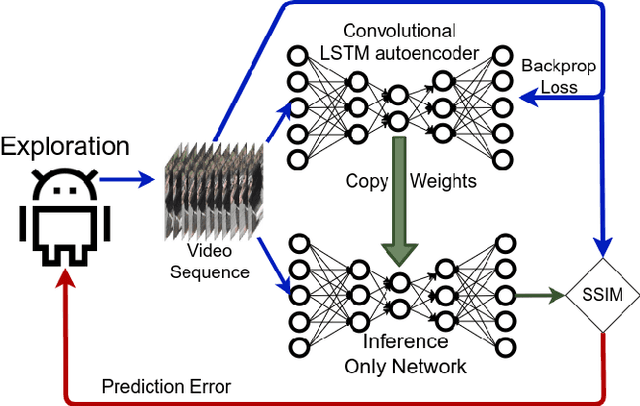
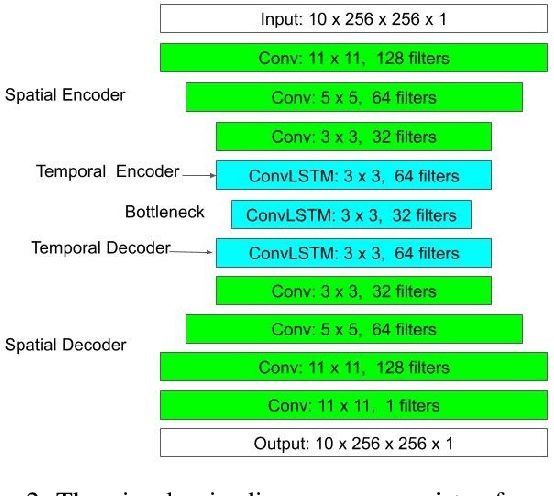
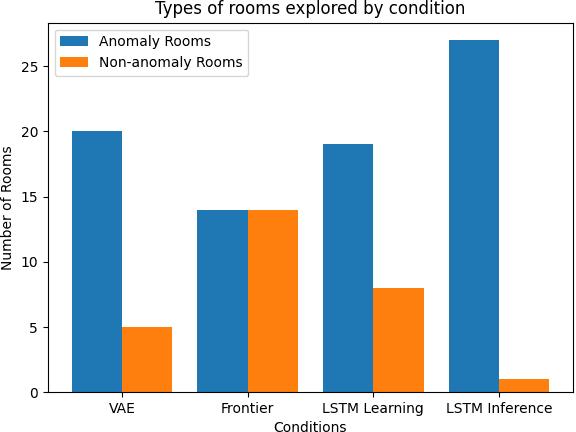
In humans, intrinsic motivation is an important mechanism for open-ended cognitive development; in robots, it has been shown to be valuable for exploration. An important aspect of human cognitive development is $\textit{episodic memory}$ which enables both the recollection of events from the past and the projection of subjective future. This paper explores the use of visual episodic memory as a source of intrinsic motivation for robotic exploration problems. Using a convolutional recurrent neural network autoencoder, the agent learns an efficient representation for spatiotemporal features such that accurate sequence prediction can only happen once spatiotemporal features have been learned. Structural similarity between ground truth and autoencoder generated images is used as an intrinsic motivation signal to guide exploration. Our proposed episodic memory model also implicitly accounts for the agent's actions, motivating the robot to seek new interactive experiences rather than just areas that are visually dissimilar. When guiding robotic exploration, our proposed method outperforms the Curiosity-driven Variational Autoencoder (CVAE) at finding dynamic anomalies.
* FLAIRS 2023, 7 pages, 11 figures
Leveraging Evolutionary Algorithms for Feasible Hexapod Locomotion Across Uneven Terrain
Mar 29, 2022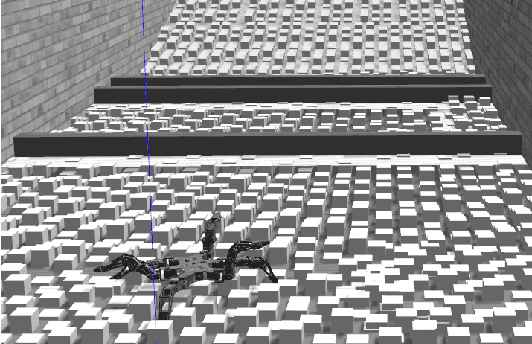
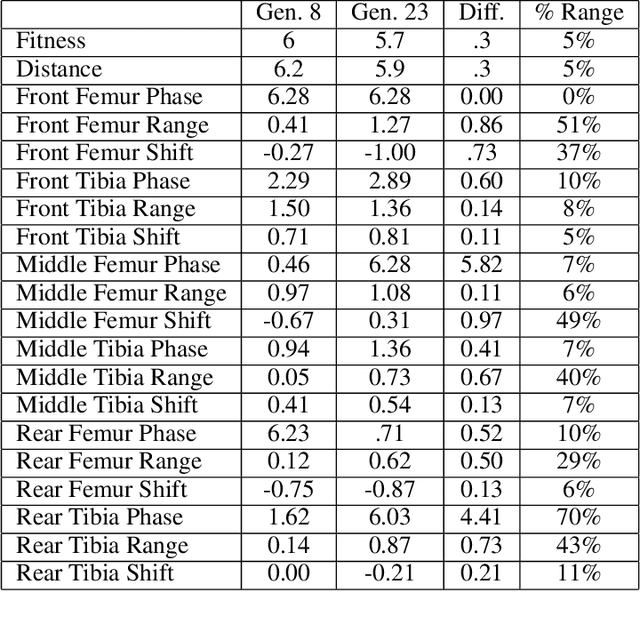
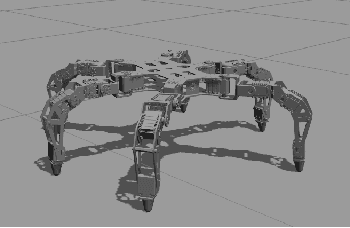
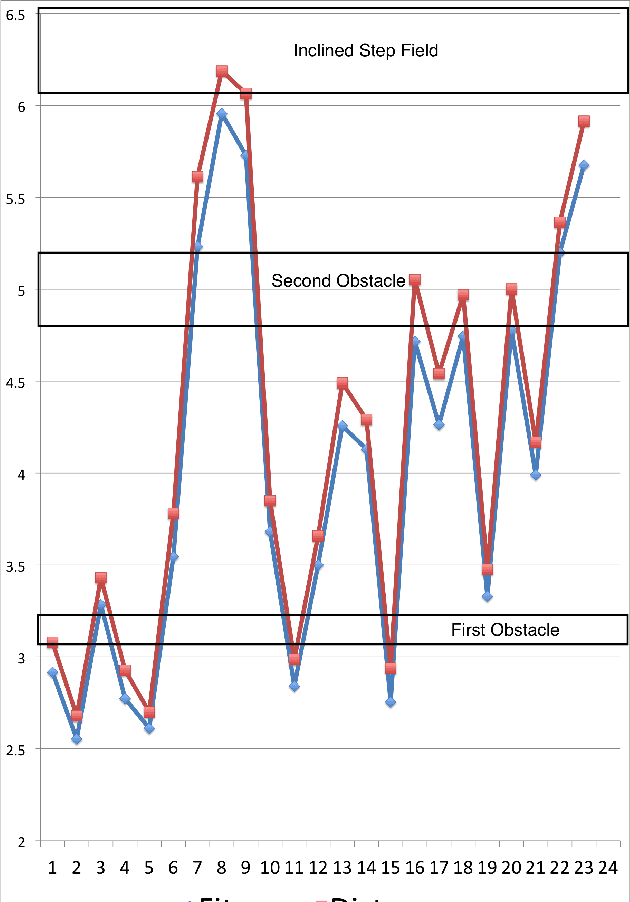
Optimizing gait stability for legged robots is a difficult problem. Even on level surfaces, effectively traversing across different textures (e.g., carpet) rests on dynamically tuning parameters in multidimensional space. Inspired by biology, evolutionary algorithms (EA) remain an attractive solution for feasibly implementing robotic locomotion with both energetic economy and rapid parameter convergence. Here, we leveraged this class of algorithms to evolve a stable hexapod gait controller capable of traversing uneven terrain and obstacles. Gait parameters were evolved in a rigid body dynamics simulation on an 8 x 3 meter obstacle course comprised of random step field, linear obstacles and inclined surfaces. Using a fitness function that jointly optimized locomotion velocity and stability, we found that multiple successful gait parameter evolutions yielded specialized functionality for each leg. Specific gait parameters were identified as critical to developing a rough terrain gait.