 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Cooperative Transport of a Suspended Payload via Two Aerial Robots with Inertial Sensing
Jul 29, 2020



This paper addresses the problem of cooperative transport of a point mass hoisted by two aerial robots. Treating the robots as a leader and a follower, the follower stabilizes the system with respect to the leader using only feedback from its Inertial Measurement Units (IMU). This is accomplished by neglecting the acceleration of the leader, analyzing the system through the generalized coordinates or the cables' angles, and employing an observation model based on the IMU measurements. A lightweight estimator based on an Extended Kalman Filter (EKF) and a controller are derived to stabilize the robot-payload-robot system. The proposed methods are verified with extensive flight experiments, first with a single robot and then with two robots. The results show that the follower is capable of realizing the desired quasi-static trajectory using only its IMU measurements. The outcomes demonstrate promising progress towards the goal of autonomous cooperative transport of a suspended payload via small flying robots with minimal sensing and computational requirements.
SplitFlyer: a Modular Quadcoptor that Disassembles into Two Flying Robots
Jul 29, 2020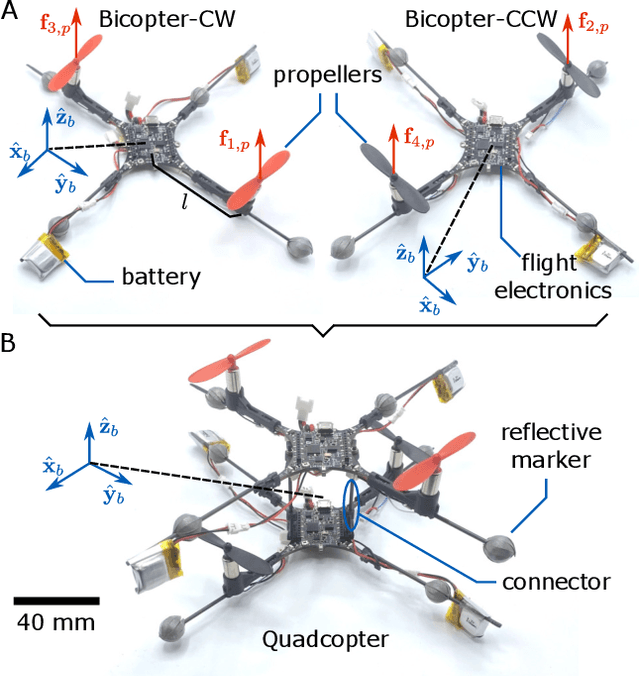
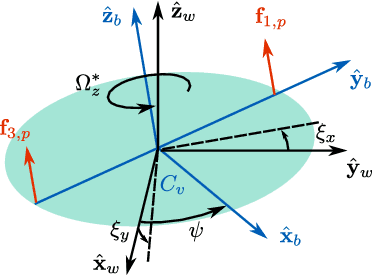
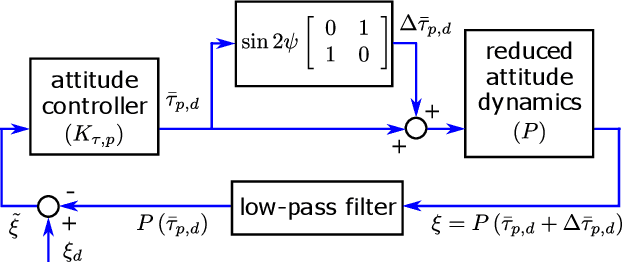
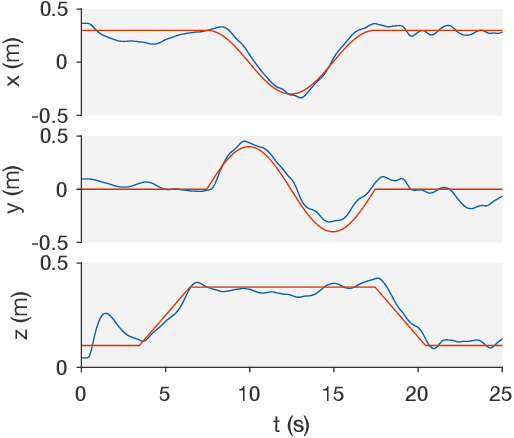
We introduce SplitFlyer--a novel quadcopter with an ability to disassemble into two self-contained bicopters through human assistance. As a subunit, the bicopter is a severely underactuated aerial vehicle equipped with only two propellers. Still, each bicopter is capable of independent flight. To achieve this, we provide an analysis of the system dynamics by relaxing the control over the yaw rotation, allowing the bicopter to maintain its large spinning rate in flight. Taking into account the gyroscopic motion, the dynamics are described and a cascaded control strategy is developed. We constructed a transformable prototype to demonstrate consecutive flights in both configurations. The results verify the proposed control strategy and show the potential of the platform for future research in modular aerial swarm robotics.
Direct Visual-Inertial Ego-Motion Estimation via Iterated Extended Kalman Filter
Jan 15, 2020



This letter proposes a reactive navigation strategy for recovering the altitude, translational velocity and orientation of Micro Aerial Vehicles. The main contribution lies in the direct and tight fusion of Inertial Measurement Unit (IMU) measurements with monocular feedback under an assumption of a single planar scene. An Iterated Extended Kalman Filter (IEKF) scheme is employed. The state prediction makes use of IMU readings while the state update relies directly on photometric feedback as measurements. Unlike feature-based methods, the photometric difference for the innovation term renders an inherent and robust data association process in a single step. The proposed approach is validated using real-world datasets. The results show that the proposed method offers better robustness, accuracy, and efficiency than a feature-based approach. Further investigation suggests that the accuracy of the flight velocity estimates from the proposed approach is comparable to those of two state-of-the-art Visual Inertial Systems (VINS) while the proposed framework is $\approx15-30$ times faster thanks to the omission of reconstruction and mapping.
Universal Flying Objects (UFOs): Modular Multirotor System for Flight of Rigid Objects
Nov 09, 2019



We introduce UFO, a modular aerial robotic platform for transforming a rigid object into a multirotor robot. To achieve this, we develop flight modules, in the form of a control module and propelling modules, that can be affixed to an object. The object, or payload, serves as the airframe of the vehicle. The modular design produces a highly versatile platform as it is reconfigurable by the addition or removal of flight modules, adjustment of the modules' arrangement, or change of payloads. To facilitate the flight control, we propose an IMU-based estimation strategy for rapid computation of the robot's configuration. When combined with the adaptive geometric controller for further refinement of uncertain parameters, stable flights are accomplished with minimal manual intervention or tuning required by a user. To this end, we demonstrate hovering and trajectory tracking flights through various robot's configurations with different dummy payloads, weighing ~200-800 grams, using four to eight propelling modules. The results reveal that stable flights are attainable thanks to the proposed IMU-based estimation method. The flight performance is markedly improved over time through the adaptive scheme, with the position errors of a few centimeters after the parameter convergence.
Design and Take-Off Flight of a Samara-Inspired Revolving-Wing Robot
Jul 18, 2019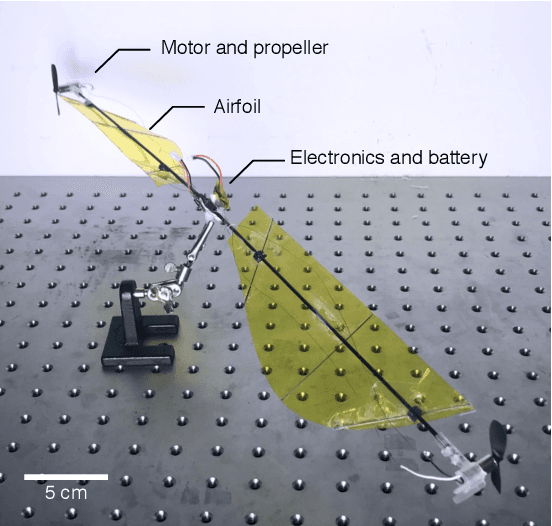
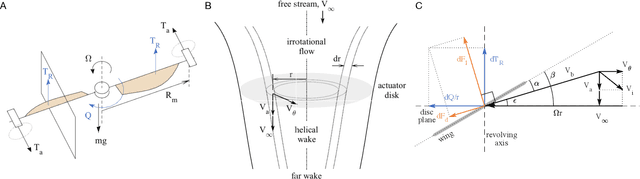
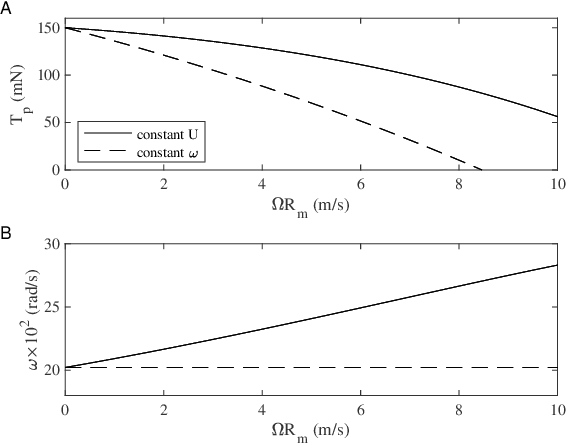
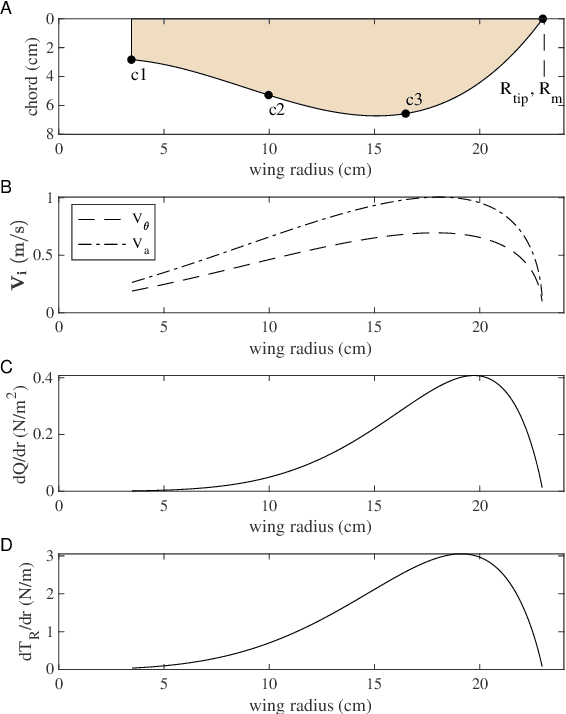
Motivated by a winged seed, which takes advantage of a wing with high angles of attack and its associated leading-edge vortex to boost lift, we propose a powered 13.8-gram aerial robot with the maximum take-off weight of 310 mN (31.6 gram) or thrust-to-weight ratio of 2.3. The robot, consisting of two airfoils and two horizontally directed motor-driven propellers, revolves around its vertical axis to hover. To amplify the thrust production while retaining a minimal weight, we develop an optimization framework for the robot and airfoil geometries. The analysis integrates quasi-steady aerodynamic models for the airfoils and the propellers with the motor model. We fabricated the robots according to the optimized design. The prototypes are experimentally tested. The revolving-wing robot produces approximately 50% higher lift compared to conventional multirotor designs. Finally, an uncontrolled hovering flight is presented.
A Quadrotor with an Origami-Inspired Protective Mechanism
Jul 16, 2019



Despite advances in localization and navigation, aerial robots inevitably remain susceptible to accidents and collisions. In this work, we propose a passive foldable airframe as a protective mechanism for a small aerial robot. A foldable quadrotor is designed and fabricated using the origami-inspired manufacturing paradigm. Upon an accidental mid-flight collision, the deformable airframe is mechanically activated. The rigid frame reconfigures its structure to protect the central part of the robot that houses sensitive components from a crash to the ground. The proposed robot is fabricated, modeled, and characterized. The 51-gram vehicle demonstrates the desired folding sequence in less than 0.15 s when colliding with a wall when flying.
Trajectory Generation for Underactuated Multirotor Vehicles with Tilted Propellers via a Flatness-based Method
May 16, 2019



This paper considers a class of rotary-wing aerial robots with unaligned propellers. By studying the dynamics of these vehicles, we show that the position and heading angle remain flat outputs of the system (similar to conventional quadrotors). The implication is that they can be commanded to follow desired trajectory setpoints in 3D space. We propose a numerical strategy based on the collocation method to facilitate the trajectory generation. This enables convenient computation of the nominal robot's attitude and control inputs. The proposed methods are numerically verified for three multirotor robots with different dynamics. These include a tricopter with a tilting propeller, and a quadrotor and a hexacopter with unparalleled propellers.
Ceiling Effects for Hybrid Aerial-Surface Locomotion of Small Rotorcraft
May 12, 2019



As platform size is reduced, the flight of aerial robots becomes increasingly energetically expensive. Limitations on payload and endurance of these small robots have prompted researchers to explore the use of bimodal aerial-surface locomotion as a strategy to prolong operation time while retaining a high vantage point. In this work, we propose the use of "ceiling effects" as a power conserving strategy for small rotorcraft to perch on an overhang. In the vicinity of a ceiling, spinning propellers generate marked higher thrust. To understand the observed aerodynamic phenomena, the momentum theory and the blade element method are employed to describe the thrust, power, and rotational rate of spinning propellers in terms of propeller-to-ceiling distance. The models, which take into account the influence of neighboring propellers as present in multirotor vehicles, are verified using two propeller types (23-mm and 50-mm radii) in various configurations on a benchtop setup. The results are consistent with the proposed models. In proximity to the ceiling, power consumption of propellers with 23-mm radius arranged in a quadrotor configuration was found to reduce by a factor of three. To this end, we present a conceptual prototype that demonstrates the use of ceiling effects for perching maneuvers. Overall, the promising outcomes highlight possible uses of ceiling effects for efficient bimodal locomotion in small multirotor vehicles.