 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSplitFlyer: a Modular Quadcoptor that Disassembles into Two Flying Robots
Jul 29, 2020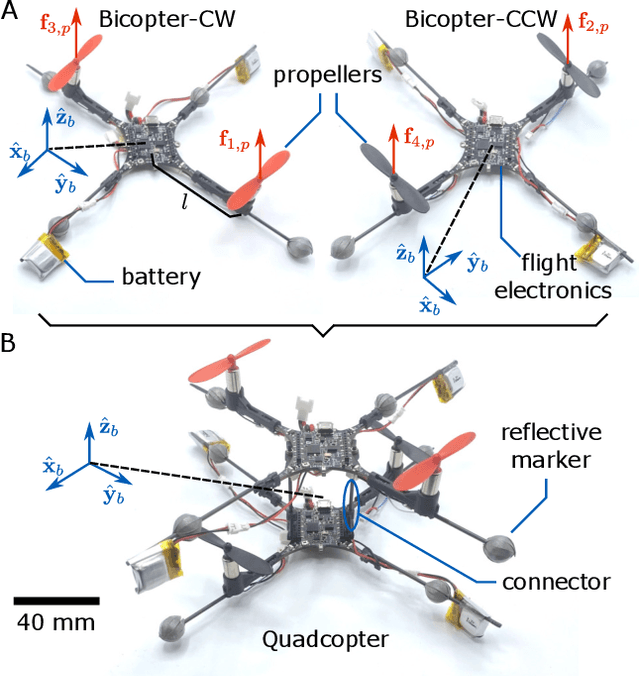
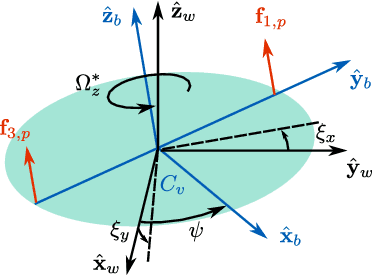
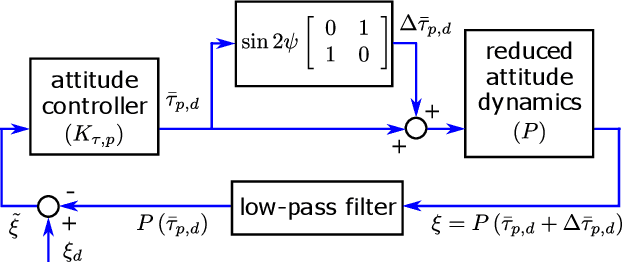
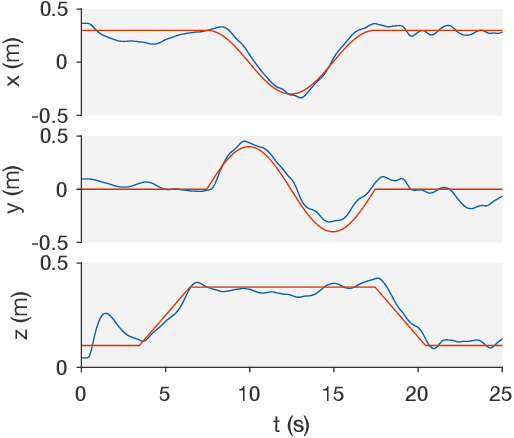
We introduce SplitFlyer--a novel quadcopter with an ability to disassemble into two self-contained bicopters through human assistance. As a subunit, the bicopter is a severely underactuated aerial vehicle equipped with only two propellers. Still, each bicopter is capable of independent flight. To achieve this, we provide an analysis of the system dynamics by relaxing the control over the yaw rotation, allowing the bicopter to maintain its large spinning rate in flight. Taking into account the gyroscopic motion, the dynamics are described and a cascaded control strategy is developed. We constructed a transformable prototype to demonstrate consecutive flights in both configurations. The results verify the proposed control strategy and show the potential of the platform for future research in modular aerial swarm robotics.
Design and Take-Off Flight of a Samara-Inspired Revolving-Wing Robot
Jul 18, 2019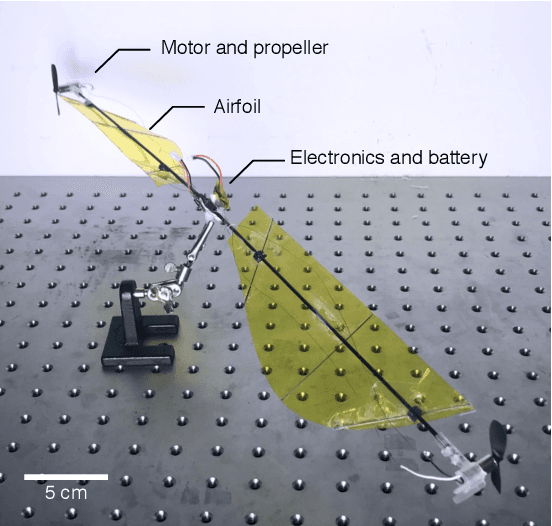
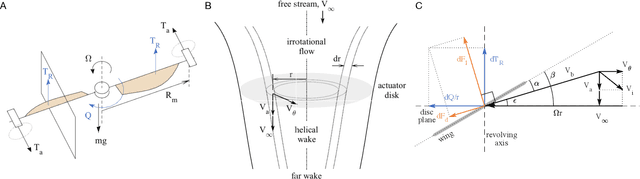
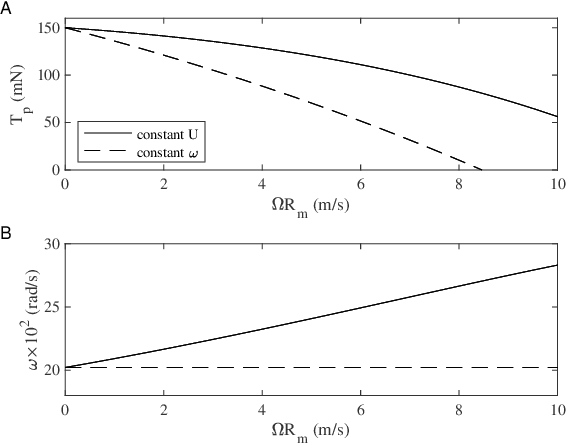
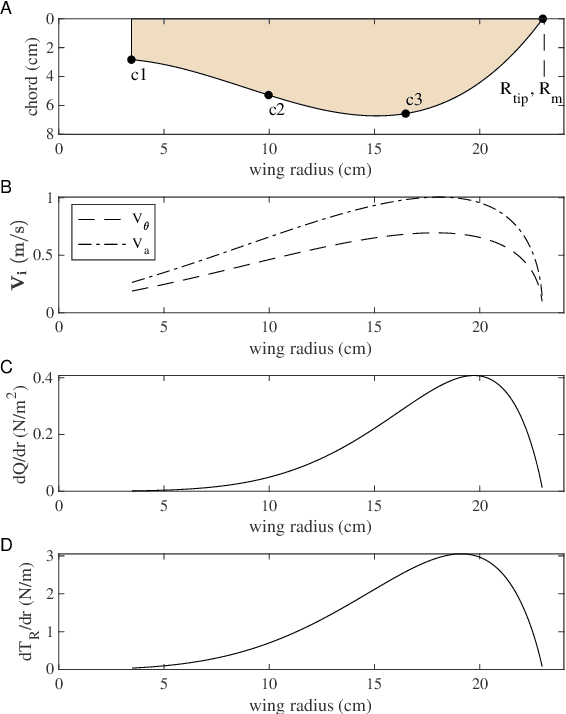
Motivated by a winged seed, which takes advantage of a wing with high angles of attack and its associated leading-edge vortex to boost lift, we propose a powered 13.8-gram aerial robot with the maximum take-off weight of 310 mN (31.6 gram) or thrust-to-weight ratio of 2.3. The robot, consisting of two airfoils and two horizontally directed motor-driven propellers, revolves around its vertical axis to hover. To amplify the thrust production while retaining a minimal weight, we develop an optimization framework for the robot and airfoil geometries. The analysis integrates quasi-steady aerodynamic models for the airfoils and the propellers with the motor model. We fabricated the robots according to the optimized design. The prototypes are experimentally tested. The revolving-wing robot produces approximately 50% higher lift compared to conventional multirotor designs. Finally, an uncontrolled hovering flight is presented.