 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Label Graph Matching for Unsupervised Video Re-Identification
Sep 27, 2017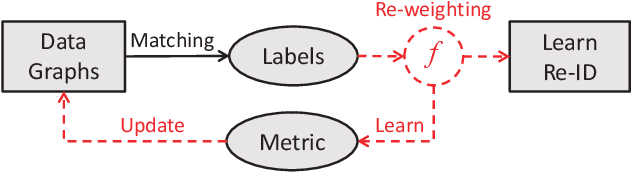

Label estimation is an important component in an unsupervised person re-identification (re-ID) system. This paper focuses on cross-camera label estimation, which can be subsequently used in feature learning to learn robust re-ID models. Specifically, we propose to construct a graph for samples in each camera, and then graph matching scheme is introduced for cross-camera labeling association. While labels directly output from existing graph matching methods may be noisy and inaccurate due to significant cross-camera variations, this paper proposes a dynamic graph matching (DGM) method. DGM iteratively updates the image graph and the label estimation process by learning a better feature space with intermediate estimated labels. DGM is advantageous in two aspects: 1) the accuracy of estimated labels is improved significantly with the iterations; 2) DGM is robust to noisy initial training data. Extensive experiments conducted on three benchmarks including the large-scale MARS dataset show that DGM yields competitive performance to fully supervised baselines, and outperforms competing unsupervised learning methods.