 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comprehensive Survey on the Multiple Travelling Salesman Problem: Applications, Approaches and Taxonomy
Feb 25, 2021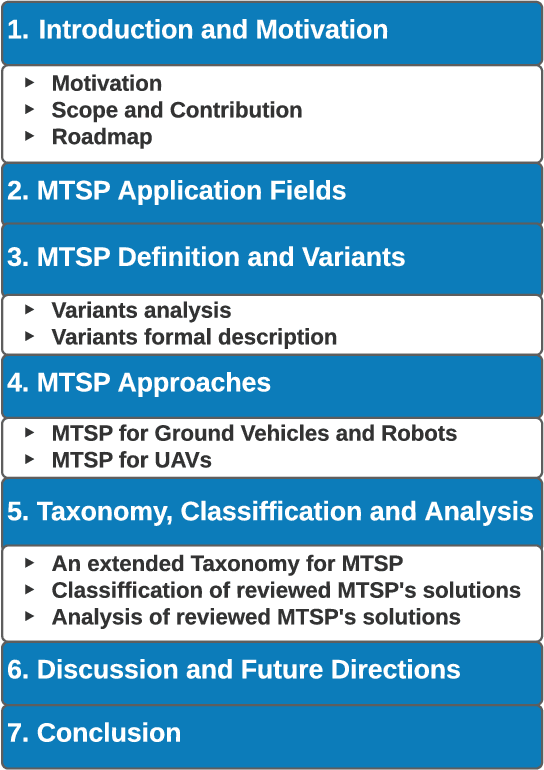
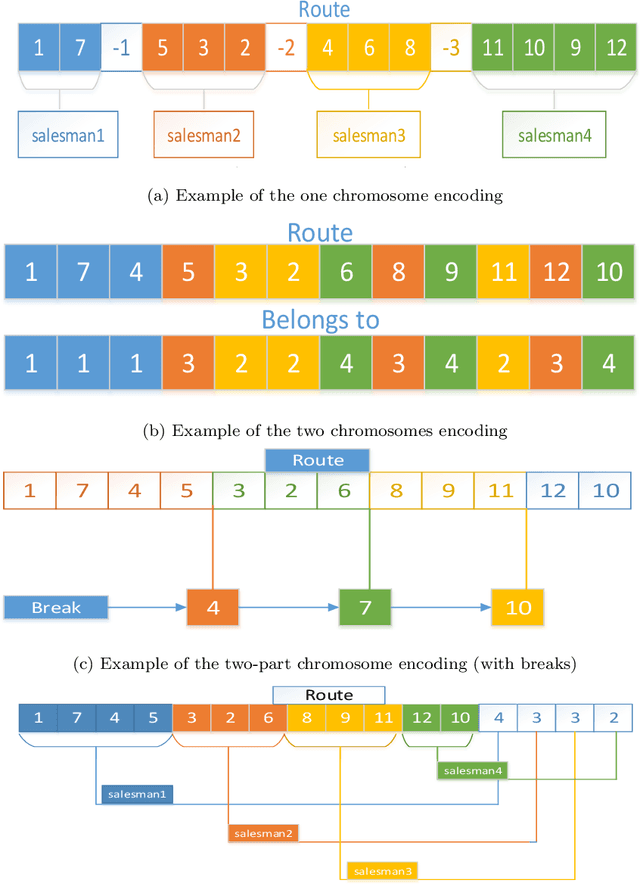
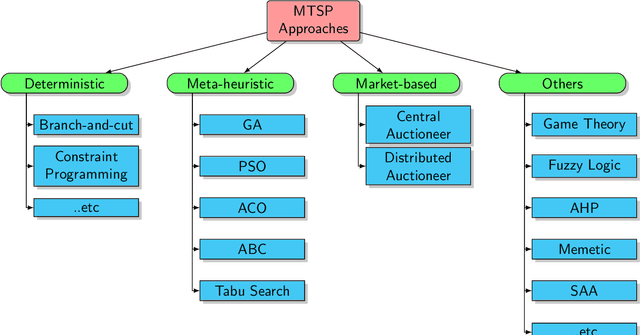
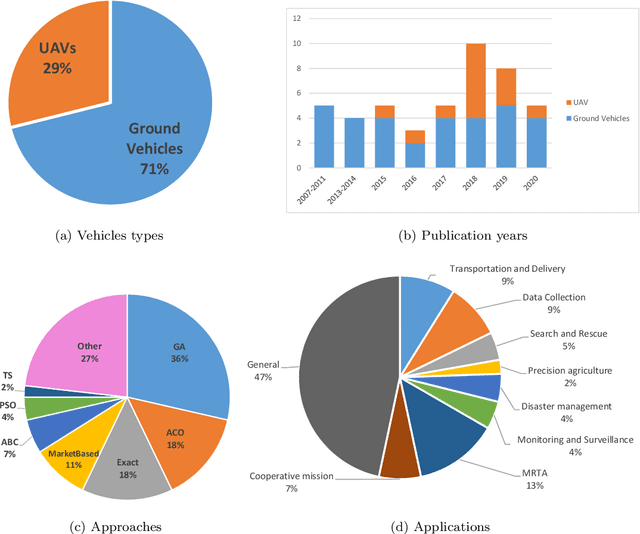
The Multiple Travelling Salesman Problem (MTSP) is among the most interesting combinatorial optimization problems because it is widely adopted in real-life applications, including robotics, transportation, networking, etc. Although the importance of this optimization problem, there is no survey dedicated to reviewing recent MTSP contributions. In this paper, we aim to fill this gap by providing a comprehensive review of existing studies on MTSP. In this survey, we focus on MTSP's recent contributions to both classical vehicles/robots and unmanned aerial vehicles. We highlight the approaches applied to solve the MTSP as well as its application domains. We analyze the MTSP variants and propose a taxonomy and a classification of recent studies.
AI-based Pilgrim Detection using Convolutional Neural Networks
Nov 18, 2019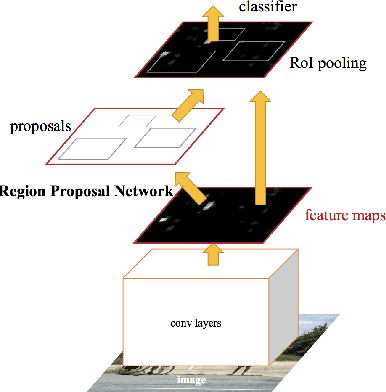
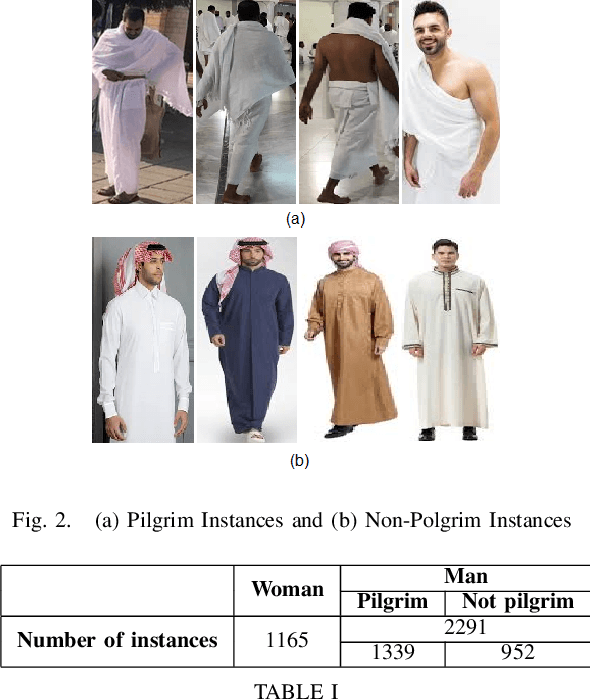
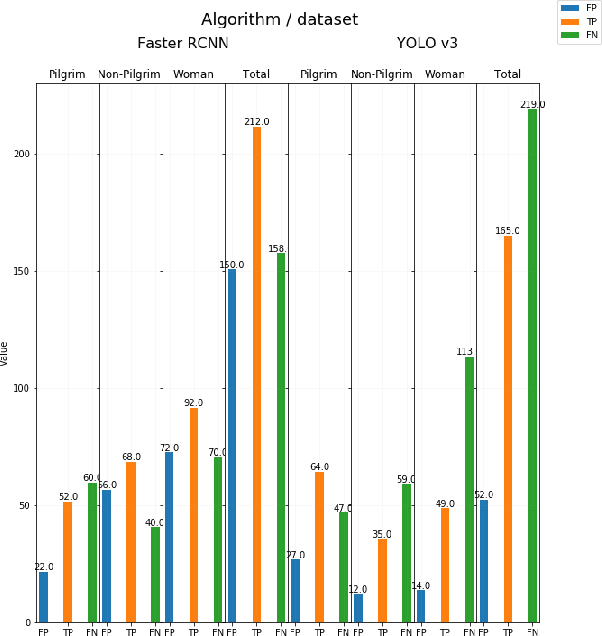
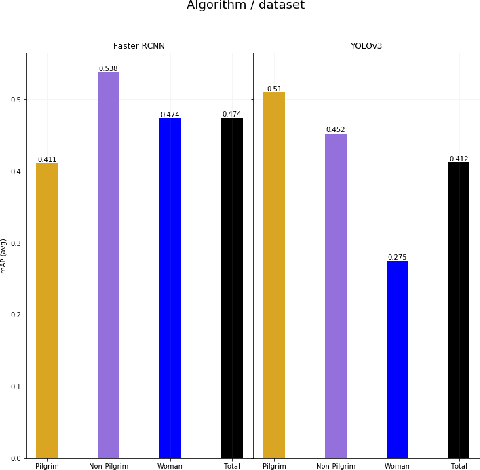
Pilgrimage represents the most important Islamic religious gathering in the world where millions of pilgrims visit the holy places of Makkah and Madinah to perform their rituals. The safety and security of pilgrims is the highest priority for the authorities. In Makkah, 5000 cameras are spread around the holy for monitoring pilgrims, but it is almost impossible to track all events by humans considering the huge number of images collected every second. To address this issue, we propose to use artificial intelligence technique based on deep learning and convolution neural networks to detect and identify Pilgrims and their features. For this purpose, we built a comprehensive dataset for the detection of pilgrims and their genders. Then, we develop two convolutional neural networks based on YOLOv3 and Faster-RCNN for the detection of Pilgrims. Experiments results show that Faster RCNN with Inception v2 feature extractor provides the best mean average precision over all classes of 51%.
MAVSec: Securing the MAVLink Protocol for Ardupilot/PX4 Unmanned Aerial Systems
May 04, 2019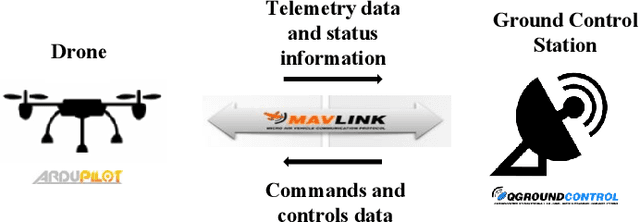

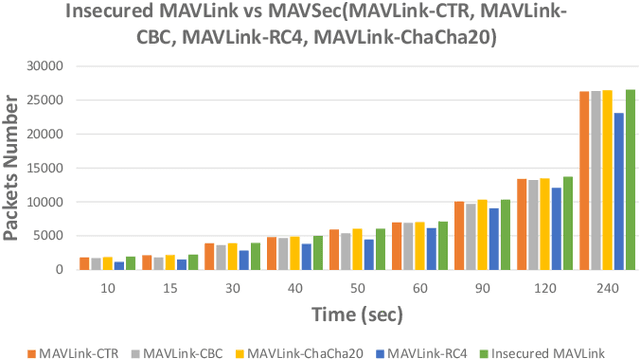
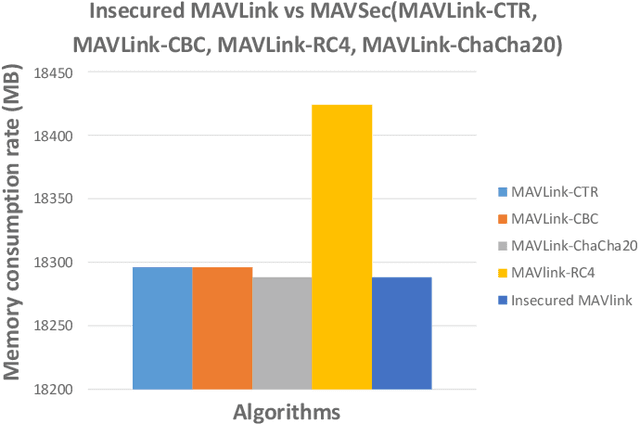
The MAVLink is a lightweight communication protocol between Unmanned Aerial Vehicles (UAVs) and ground control stations (GCSs). It defines a set of bi-directional messages exchanged between a UAV (aka drone) and a ground station. The messages carry out information about the UAV's states and control commands sent from the ground station. However, the MAVLink protocol is not secure and has several vulnerabilities to different attacks that result in critical threats and safety concerns. Very few studies provided solutions to this problem. In this paper, we discuss the security vulnerabilities of the MAVLink protocol and propose MAVSec, a security-integrated mechanism for MAVLink that leverages the use of encryption algorithms to ensure the protection of exchanged MAVLink messages between UAVs and GCSs. To validate MAVSec, we implemented it in Ardupilot and evaluated the performance of different encryption algorithms (i.e. AES-CBC, AES-CTR, RC4, and ChaCha20) in terms of memory usage and CPU consumption. The experimental results show that ChaCha20 has a better performance and is more efficient than other encryption algorithms. Integrating ChaCha20 into MAVLink can guarantee its messages confidentiality, without affecting its performance, while occupying less memory and CPU consumption, thus, preserving memory and saving the battery for the resource-constrained drone.
* The paper is accepted in the International Wireless Communications and Mobile Computing Conference (IWCMC) in Morocco, June 2019