 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMAVSec: Securing the MAVLink Protocol for Ardupilot/PX4 Unmanned Aerial Systems
May 04, 2019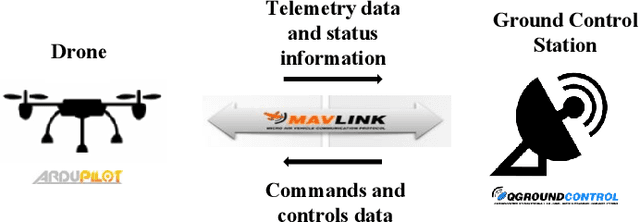

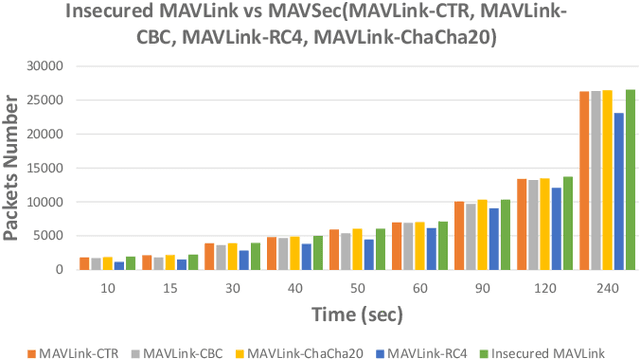
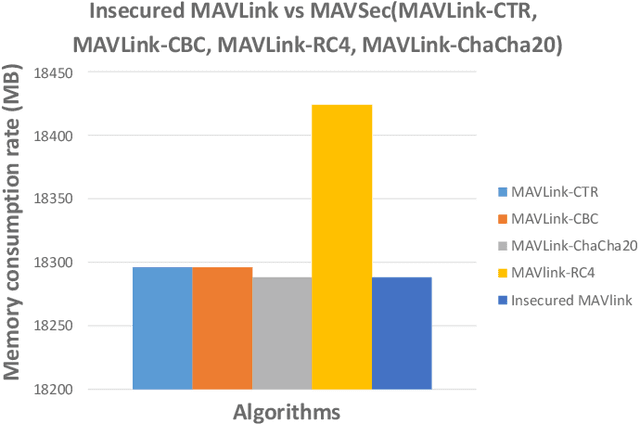
The MAVLink is a lightweight communication protocol between Unmanned Aerial Vehicles (UAVs) and ground control stations (GCSs). It defines a set of bi-directional messages exchanged between a UAV (aka drone) and a ground station. The messages carry out information about the UAV's states and control commands sent from the ground station. However, the MAVLink protocol is not secure and has several vulnerabilities to different attacks that result in critical threats and safety concerns. Very few studies provided solutions to this problem. In this paper, we discuss the security vulnerabilities of the MAVLink protocol and propose MAVSec, a security-integrated mechanism for MAVLink that leverages the use of encryption algorithms to ensure the protection of exchanged MAVLink messages between UAVs and GCSs. To validate MAVSec, we implemented it in Ardupilot and evaluated the performance of different encryption algorithms (i.e. AES-CBC, AES-CTR, RC4, and ChaCha20) in terms of memory usage and CPU consumption. The experimental results show that ChaCha20 has a better performance and is more efficient than other encryption algorithms. Integrating ChaCha20 into MAVLink can guarantee its messages confidentiality, without affecting its performance, while occupying less memory and CPU consumption, thus, preserving memory and saving the battery for the resource-constrained drone.
* The paper is accepted in the International Wireless Communications and Mobile Computing Conference (IWCMC) in Morocco, June 2019
Qualitative and Quantitative Risk Analysis and Safety Assessment of Unmanned Aerial Vehicles Missions over the Internet
Apr 20, 2019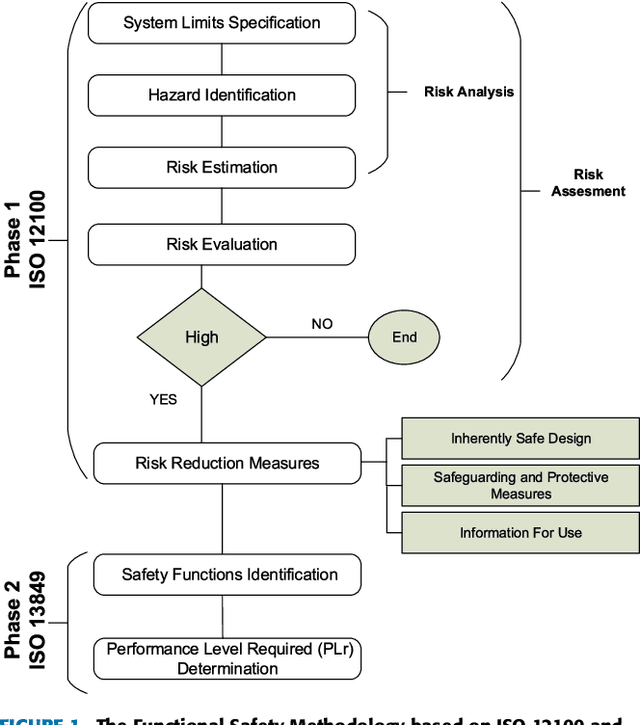

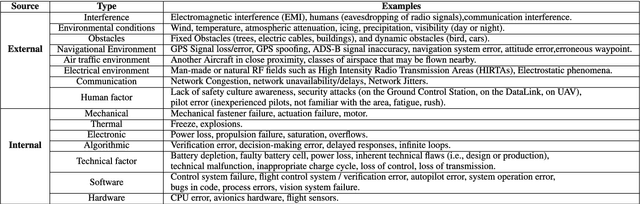
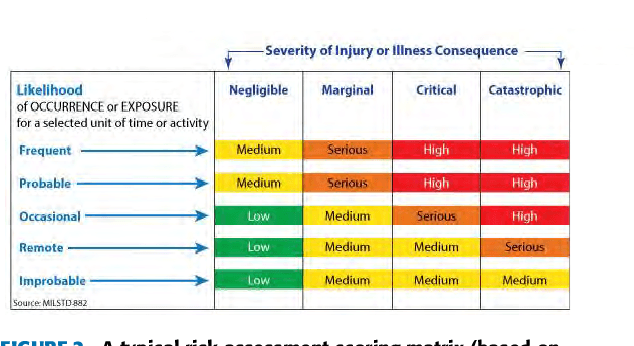
In the last few years, Unmanned Aerial Vehicles (UAVs) are making a revolution as an emerging technology with many different applications in the military, civilian, and commercial fields. The advent of autonomous drones has initiated serious challenges, including how to maintain their safe operation during their missions. The safe operation of UAVs remains an open and sensitive issue since any unexpected behavior of the drone or any hazard would lead to potential risks that might be very severe. The motivation behind this work is to propose a methodology for the safety assurance of drones over the Internet {(Internet of drones (IoD))}. Two approaches will be used in performing the safety analysis: (1) a qualitative safety analysis approach, and (2) a quantitative safety analysis approach. The first approach uses the international safety standards, namely ISO 12100 and ISO 13849 to assess the safety of drone's missions by focusing on qualitative assessment techniques. The methodology starts with hazard identification, risk assessment, risk mitigation, and finally, draws the safety recommendations associated with a drone delivery use case. The second approach presents a method for the quantitative safety assessment using Bayesian Networks (BN) for probabilistic modeling. BN utilizes the information provided by the first approach to model the safety risks related to UAVs' flights. An illustrative UAV crash scenario is presented as a case study, followed by scenario analysis, to demonstrate the applicability of the proposed approach. These two analyses, qualitative and quantitative, enable { all involved stakeholders} to detect, explore and address the risks of UAV flights, which will help the industry to better manage the safety concerns of UAVs.
* Accepted in IEEE Access, April 2019