 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAblation Path Saliency
Sep 26, 2022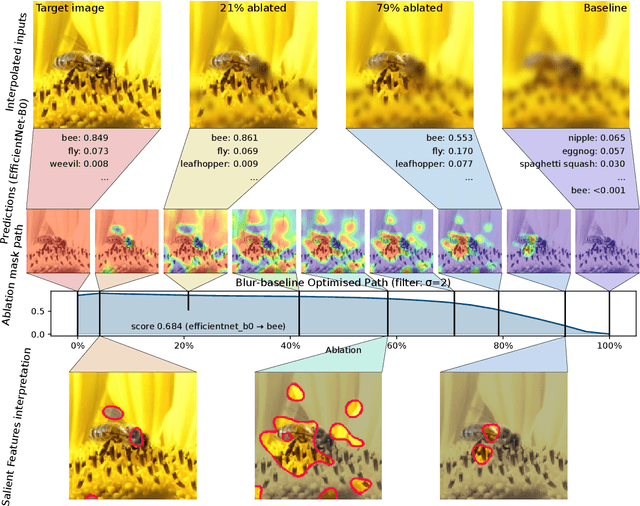

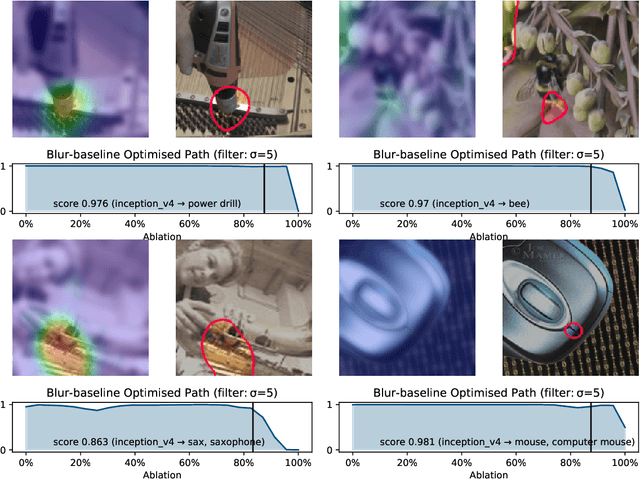
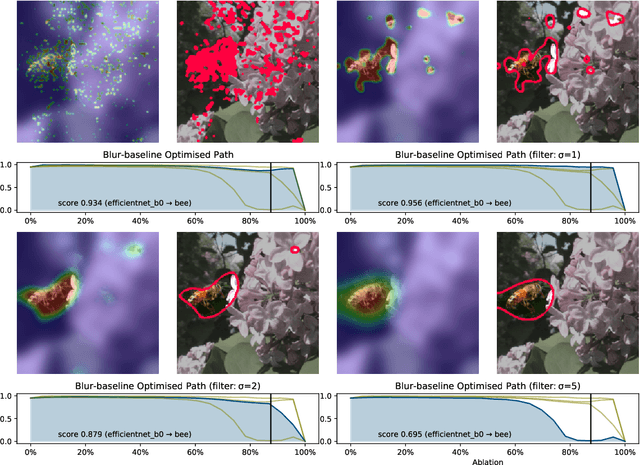
Various types of saliency methods have been proposed for explaining black-box classification. In image applications, this means highlighting the part of the image that is most relevant for the current decision. We observe that several of these methods can be seen as edge cases of a single, more general procedure based on finding a particular ablation path through the classifier's domain. This gives additional geometric insight to the existing methods. We also demonstrate that this ablation path method can be used as a technique in its own right, the higher computational cost being traded against additional information given by the path.
The ML-EM algorithm in continuum: sparse measure solutions
Sep 04, 2019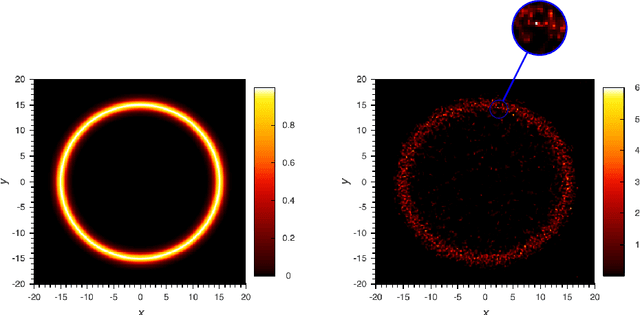
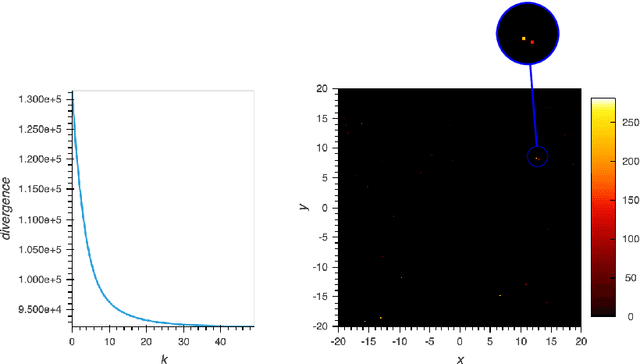
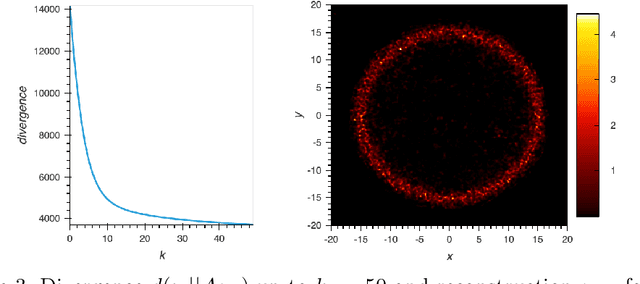
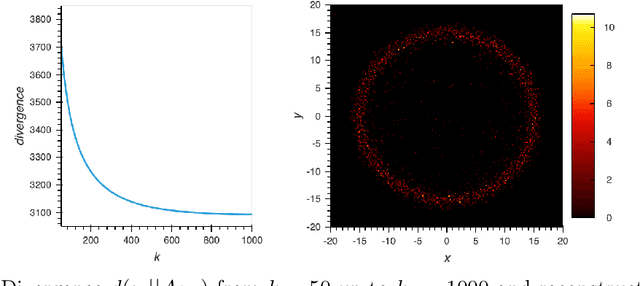
Linear inverse problems $A \mu = \delta$ with Poisson noise and non-negative unknown $\mu \geq 0$ are ubiquitous in applications, for instance in Positron Emission Tomography (PET) in medical imaging. The associated maximum likelihood problem is routinely solved using an expectation-maximisation algorithm (ML-EM). This typically results in images which look spiky, even with early stopping. We give an explanation for this phenomenon. We first regard the image $\mu$ as a measure. We prove that if the measurements $\delta$ are not in the cone $\{A \mu, \mu \geq 0\}$, which is typical of short exposure times, likelihood maximisers as well as ML-EM cluster points must be sparse, i.e., typically a sum of point masses. On the other hand, in the long exposure regime, we prove that cluster points of ML-EM will be measures without singular part. Finally, we provide concentration bounds for the probability to be in the sparse case.
Spatiotemporal PET reconstruction using ML-EM with learned diffeomorphic deformation
Aug 26, 2019
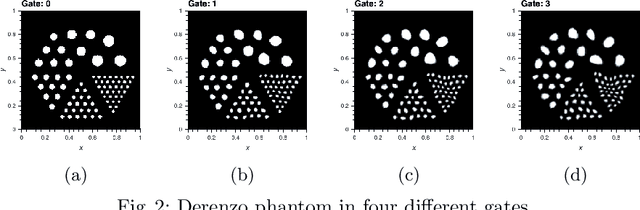
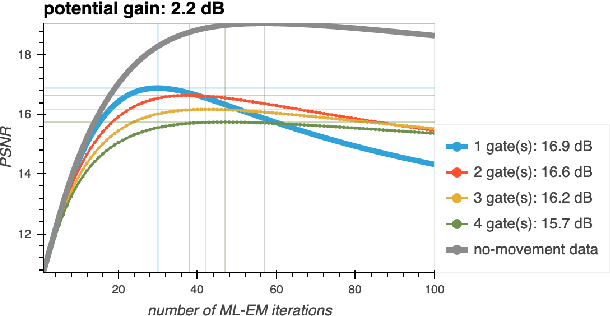
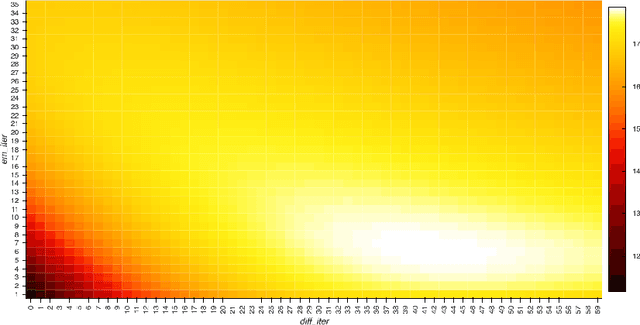
Patient movement in emission tomography deteriorates reconstruction quality because of motion blur. Gating the data improves the situation somewhat: each gate contains a movement phase which is approximately stationary. A standard method is to use only the data from a few gates, with little movement between them. However, the corresponding loss of data entails an increase of noise. Motion correction algorithms have been implemented to take into account all the gated data, but they do not scale well, especially not in 3D. We propose a novel motion correction algorithm which addresses the scalability issue. Our approach is to combine an enhanced ML-EM algorithm with deep learning based movement registration. The training is unsupervised, and with artificial data. We expect this approach to scale very well to higher resolutions and to 3D, as the overall cost of our algorithm is only marginally greater than that of a standard ML-EM algorithm. We show that we can significantly decrease the noise corresponding to a limited number of gates.
Task adapted reconstruction for inverse problems
Aug 27, 2018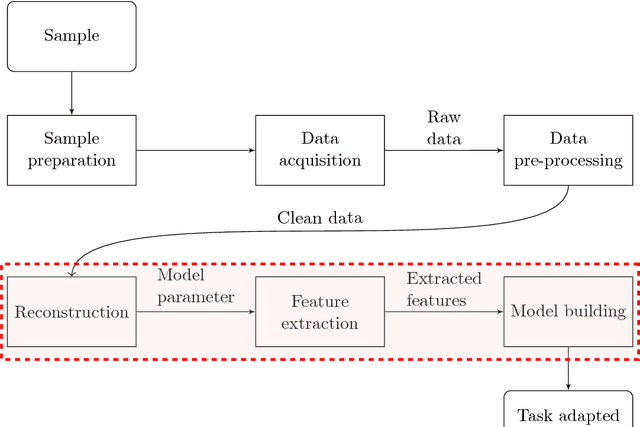
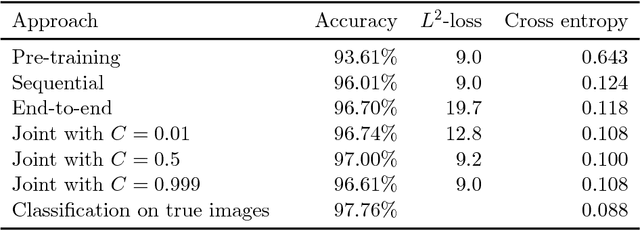
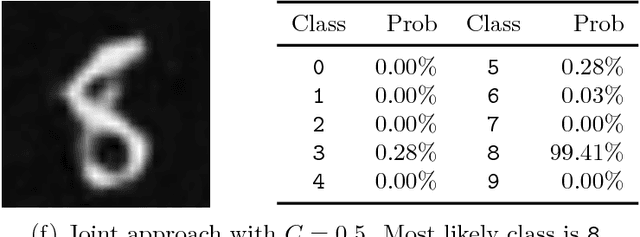
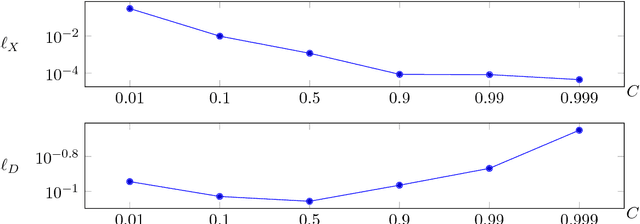
The paper considers the problem of performing a task defined on a model parameter that is only observed indirectly through noisy data in an ill-posed inverse problem. A key aspect is to formalize the steps of reconstruction and task as appropriate estimators (non-randomized decision rules) in statistical estimation problems. The implementation makes use of (deep) neural networks to provide a differentiable parametrization of the family of estimators for both steps. These networks are combined and jointly trained against suitable supervised training data in order to minimize a joint differentiable loss function, resulting in an end-to-end task adapted reconstruction method. The suggested framework is generic, yet adaptable, with a plug-and-play structure for adjusting both the inverse problem and the task at hand. More precisely, the data model (forward operator and statistical model of the noise) associated with the inverse problem is exchangeable, e.g., by using neural network architecture given by a learned iterative method. Furthermore, any task that is encodable as a trainable neural network can be used. The approach is demonstrated on joint tomographic image reconstruction, classification and joint tomographic image reconstruction segmentation.