 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProceedings of the 2018 XCSP3 Competition
Dec 17, 2018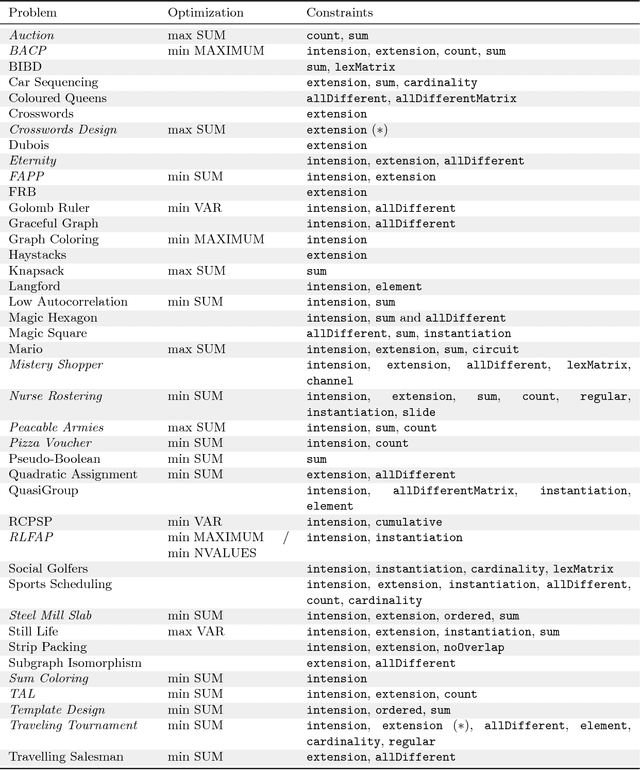
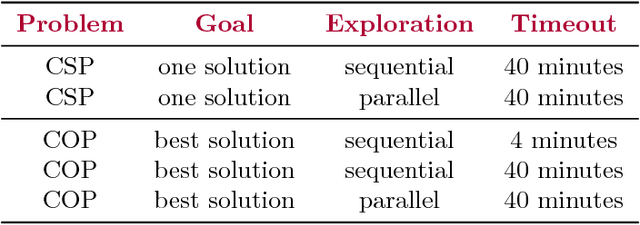


This document represents the proceedings of the 2018 XCSP3 Competition. The results of this competition of constraint solvers were presented at CP'18, the 24th International Conference on Principles and Practice of Constraint Programming, held in Lille, France from 27th August 2018 to 31th August, 2018.
Motion Planning in Irreducible Path Spaces
Sep 14, 2018

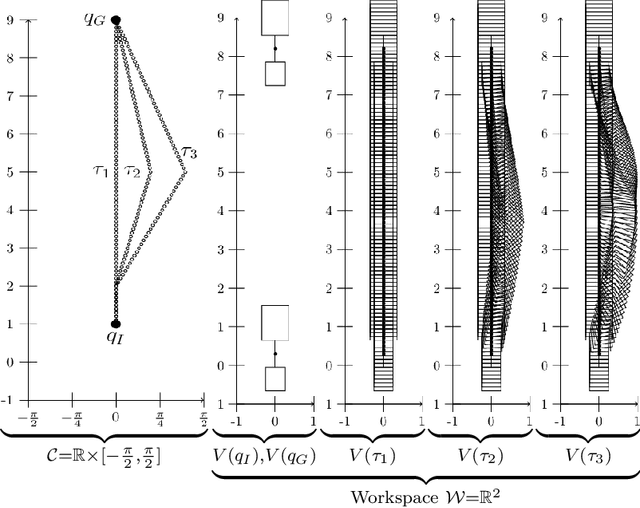
The motion of a mechanical system can be defined as a path through its configuration space. Computing such a path has a computational complexity scaling exponentially with the dimensionality of the configuration space. We propose to reduce the dimensionality of the configuration space by introducing the irreducible path --- a path having a minimal swept volume. The paper consists of three parts: In part I, we define the space of all irreducible paths and show that planning a path in the irreducible path space preserves completeness of any motion planning algorithm. In part II, we construct an approximation to the irreducible path space of a serial kinematic chain under certain assumptions. In part III, we conduct motion planning using the irreducible path space for a mechanical snake in a turbine environment, for a mechanical octopus with eight arms in a pipe system and for the sideways motion of a humanoid robot moving through a room with doors and through a hole in a wall. We demonstrate that the concept of an irreducible path can be applied to any motion planning algorithm taking curvature constraints into account.
Solving WCSP by Extraction of Minimal Unsatisfiable Cores
Apr 19, 2013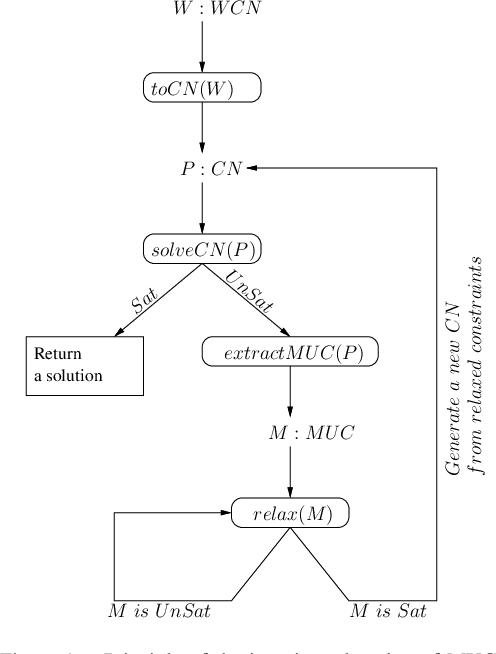
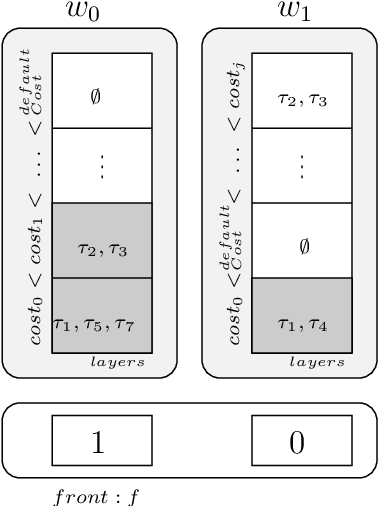
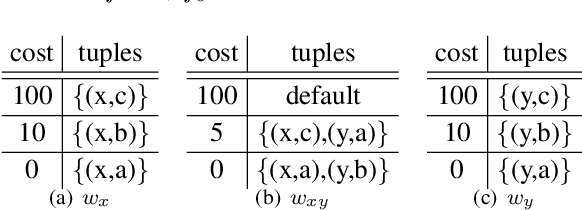
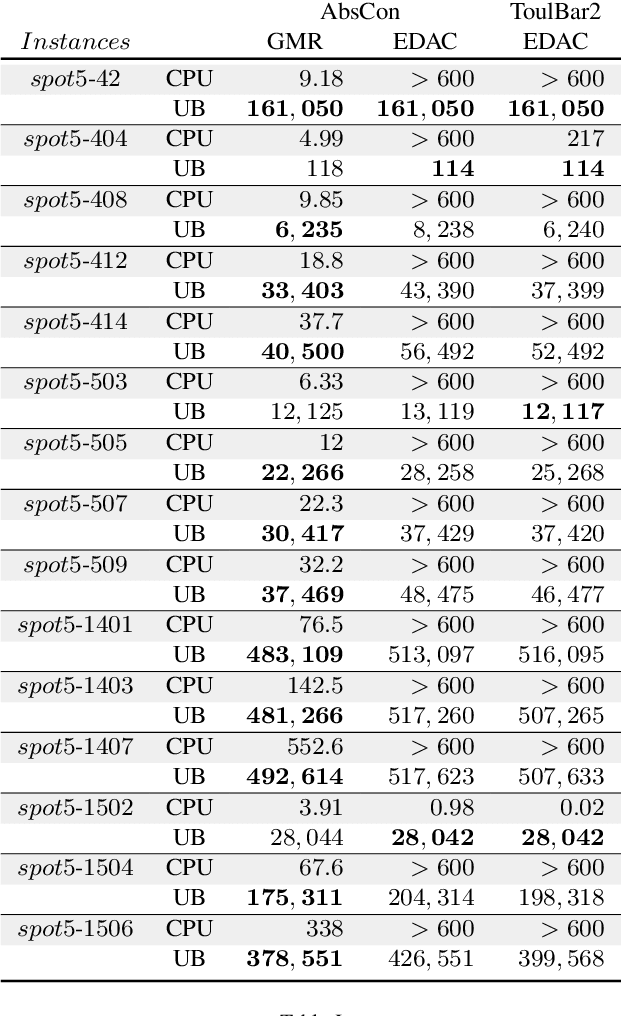
Usual techniques to solve WCSP are based on cost transfer operations coupled with a branch and bound algorithm. In this paper, we focus on an approach integrating extraction and relaxation of Minimal Unsatisfiable Cores in order to solve this problem. We decline our approach in two ways: an incomplete, greedy, algorithm and a complete one.
XML Representation of Constraint Networks: Format XCSP 2.1
Feb 13, 2009
We propose a new extended format to represent constraint networks using XML. This format allows us to represent constraints defined either in extension or in intension. It also allows us to reference global constraints. Any instance of the problems CSP (Constraint Satisfaction Problem), QCSP (Quantified CSP) and WCSP (Weighted CSP) can be represented using this format.