 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph-based Motion Planning for Automated Vehicles using Multi-model Branching and Admissible Heuristics
Feb 15, 2021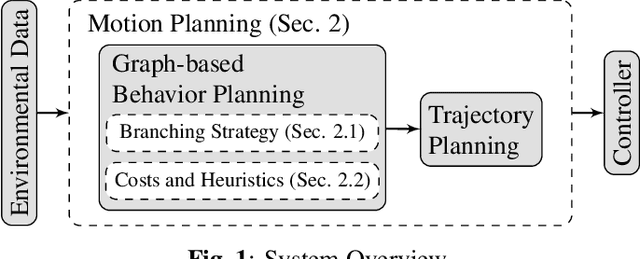
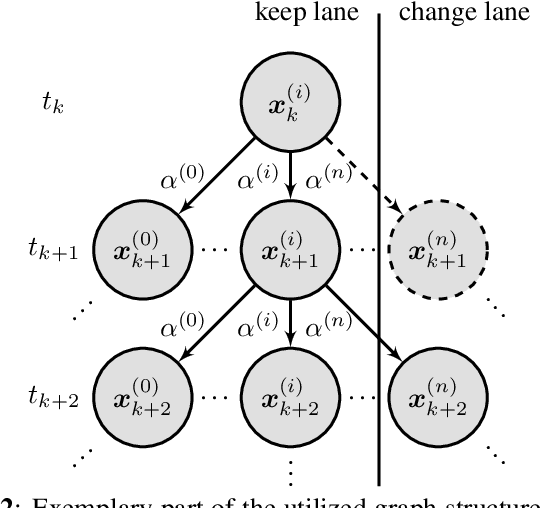
Automated driving in urban scenarios requires efficient planning algorithms able to handle complex situations in real-time. A popular approach is to use graph-based planning methods in order to obtain a rough trajectory which is subsequently optimized. A key aspect is the generation of trajectories implementing comfortable and safe behavior already during graph-search while keeping computation times low. To capture this aspect, on the one hand, a branching strategy is presented in this work that leads to better performance in terms of quality of resulting trajectories and runtime. On the other hand, admissible heuristics are shown which guide the graph-search efficiently, where the solution remains optimal.
On-Road Motion Planning for Automated Vehicles at Ulm University
Dec 07, 2020
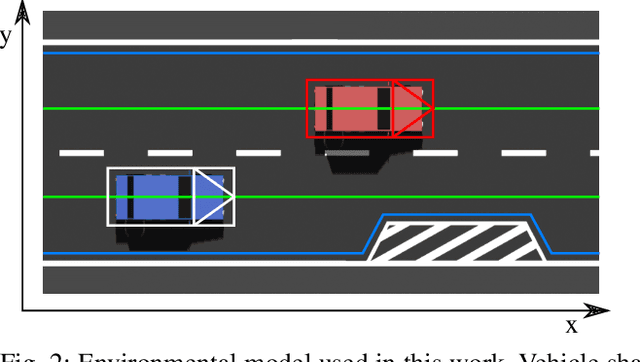
The Institute of Measurement, Control and Microtechnology of the University of Ulm investigates advanced driver assistance systems for decades and concentrates large parts on autonomous driving. It is well known: Motion planning is a key technology for autonomous driving. It is first and foremost responsible for the safety of the vehicle passengers as well as of all surrounding traffic participants. However, a further task consists also in providing a smooth and comfortable driving behavior. In Ulm, we have the grateful opportunity to test our algorithms under real conditions in public traffic and diversified scenarios. In this paper, we would like to give the readers an insight of our work, about the vehicle, the test track, as well as of the related problems, challenges and solutions. Therefore, we will describe the motion planning system and explain the implemented functionalities. Furthermore, we will show how our vehicle moves through public road traffic and how it deals with challenging scenarios like e.g. driving through roundabouts and intersections.
Trajectory Planning for Automated Driving in Intersection Scenarios using Driver Models
Oct 07, 2020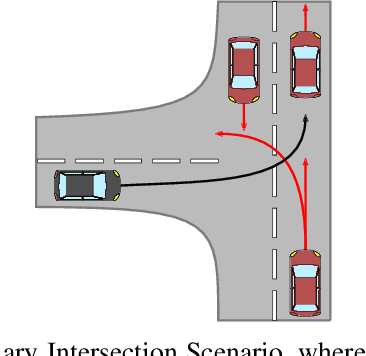
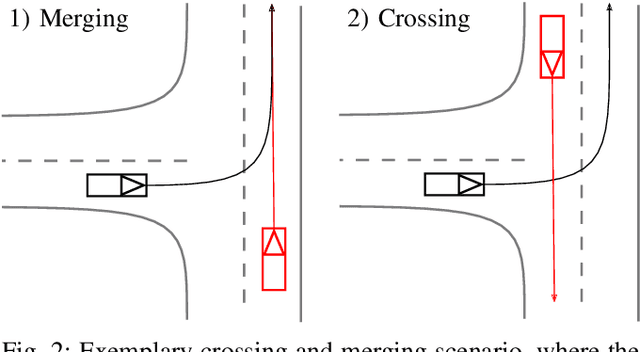
Efficient trajectory planning for urban intersections is currently one of the most challenging tasks for an Autonomous Vehicle (AV). Courteous behavior towards other traffic participants, the AV's comfort and its progression in the environment are the key aspects that determine the performance of trajectory planning algorithms. To capture these aspects, we propose a novel trajectory planning framework that ensures social compliance and simultaneously optimizes the AV's comfort subject to kinematic constraints. The framework combines a local continuous optimization approach and an efficient driver model to ensure fast behavior prediction, maneuver generation and decision making over long horizons. The proposed framework is evaluated in different scenarios to demonstrate its capabilities in terms of the resulting trajectories and runtime.
Towards Courteous Behavior and Trajectory Planning for Automated Driving
Jul 23, 2019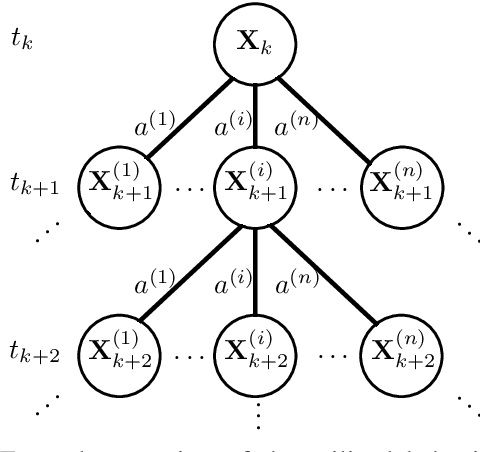
Efficient behavior and trajectory planning is one of the major challenges for automated driving. Especially intersection scenarios are very demanding due to their complexity arising from the variety of maneuver possibilities and other traffic participants. A key challenge is to generate behaviors which optimize the comfort and progress of the ego vehicle but at the same time are not too aggressive towards other traffic participants. In order to maintain real time capability for courteous behavior and trajectory planning, an efficient formulation of the optimal control problem and corresponding solving algorithms are required. Consequently, a novel planning framework is presented which considers comfort and progress as well as the courtesy of actions in a graph-based behavior planning module. Utilizing the low level trajectory generation, the behavior result can be further optimized for driving comfort while satisfying constraints over the whole planning horizon. According experiments show the practicability and real time capability of the framework.