Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph-based Motion Planning for Automated Vehicles using Multi-model Branching and Admissible Heuristics
Paper and Code
Feb 15, 2021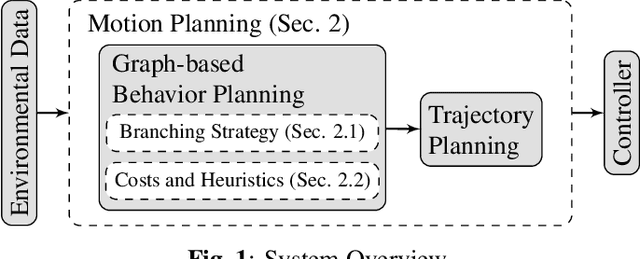
Automated driving in urban scenarios requires efficient planning algorithms able to handle complex situations in real-time. A popular approach is to use graph-based planning methods in order to obtain a rough trajectory which is subsequently optimized. A key aspect is the generation of trajectories implementing comfortable and safe behavior already during graph-search while keeping computation times low. To capture this aspect, on the one hand, a branching strategy is presented in this work that leads to better performance in terms of quality of resulting trajectories and runtime. On the other hand, admissible heuristics are shown which guide the graph-search efficiently, where the solution remains optimal.
View paper on