 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHard Negative Mixing for Contrastive Learning
Oct 02, 2020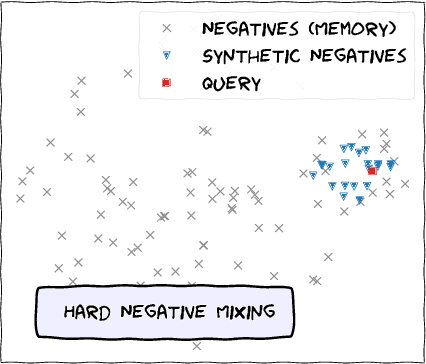
Contrastive learning has become a key component of self-supervised learning approaches for computer vision. By learning to embed two augmented versions of the same image close to each other and to push the embeddings of different images apart, one can train highly transferable visual representations. As revealed by recent studies, heavy data augmentation and large sets of negatives are both crucial in learning such representations. At the same time, data mixing strategies either at the image or the feature level improve both supervised and semi-supervised learning by synthesizing novel examples, forcing networks to learn more robust features. In this paper, we argue that an important aspect of contrastive learning, i.e., the effect of hard negatives, has so far been neglected. To get more meaningful negative samples, current top contrastive self-supervised learning approaches either substantially increase the batch sizes, or keep very large memory banks; increasing the memory size, however, leads to diminishing returns in terms of performance. We therefore start by delving deeper into a top-performing framework and show evidence that harder negatives are needed to facilitate better and faster learning. Based on these observations, and motivated by the success of data mixing, we propose hard negative mixing strategies at the feature level, that can be computed on-the-fly with a minimal computational overhead. We exhaustively ablate our approach on linear classification, object detection and instance segmentation and show that employing our hard negative mixing procedure improves the quality of visual representations learned by a state-of-the-art self-supervised learning method.
R2D2: Repeatable and Reliable Detector and Descriptor
Jun 17, 2019
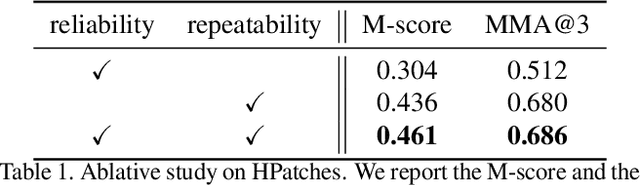
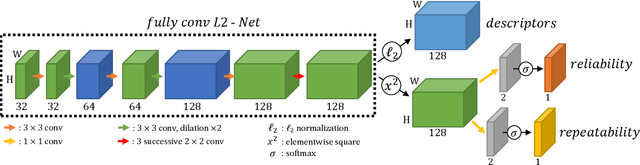
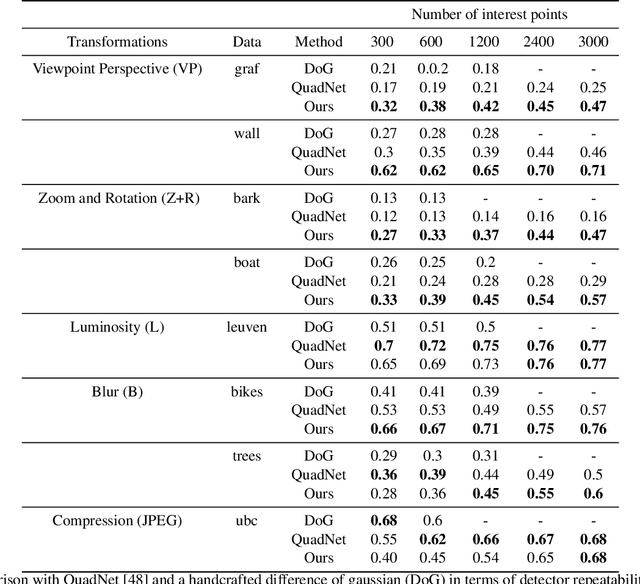
Interest point detection and local feature description are fundamental steps in many computer vision applications. Classical methods for these tasks are based on a detect-then-describe paradigm where separate handcrafted methods are used to first identify repeatable keypoints and then represent them with a local descriptor. Neural networks trained with metric learning losses have recently caught up with these techniques, focusing on learning repeatable saliency maps for keypoint detection and learning descriptors at the detected keypoint locations. In this work, we argue that salient regions are not necessarily discriminative, and therefore can harm the performance of the description. Furthermore, we claim that descriptors should be learned only in regions for which matching can be performed with high confidence. We thus propose to jointly learn keypoint detection and description together with a predictor of the local descriptor discriminativeness. This allows us to avoid ambiguous areas and leads to reliable keypoint detections and descriptions. Our detection-and-description approach, trained with self-supervision, can simultaneously output sparse, repeatable and reliable keypoints that outperforms state-of-the-art detectors and descriptors on the HPatches dataset. It also establishes a record on the recently released Aachen Day-Night localization dataset.