 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplementation of a Hierarchical fuzzy controller for a biped robot
Dec 29, 2014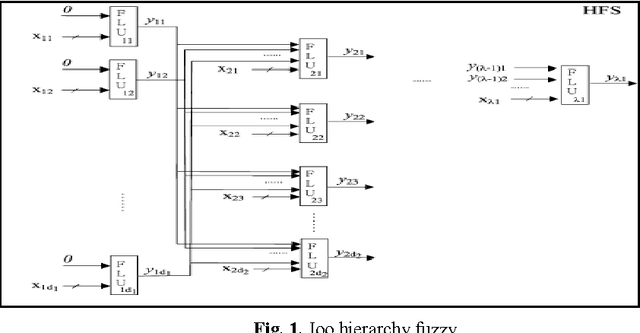
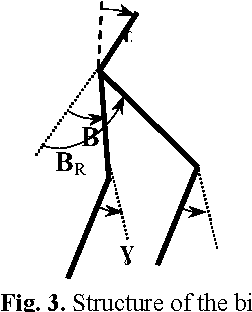
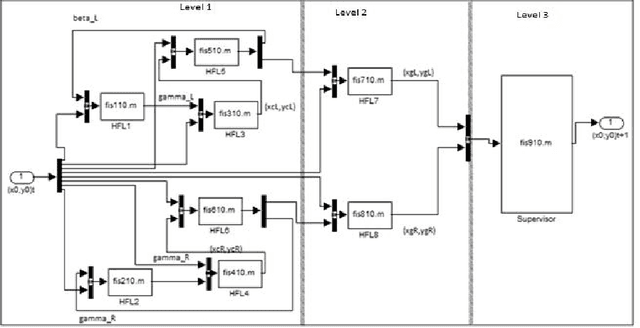
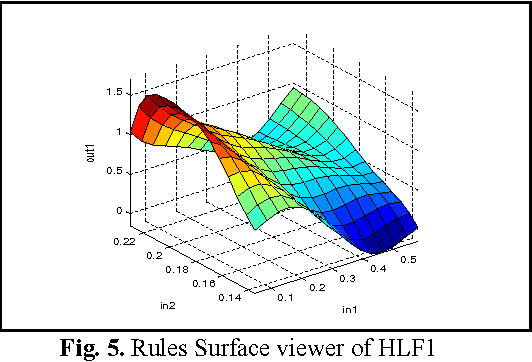
In this paper the design of a control system for a biped robot is described. Control is specified for a walk cycle of the robot. The implementation of the control system was done on Matlab Simulink. In this paper a hierarchical fuzzy logic controller (HFLC) is proposed to control a planar biped walk. The HFLC design is bio-inspired from human locomotion system. The proposed method is applied to control five links planar biped into free area and without obstacles.
A Hierarchical fuzzy controller for a biped robot
Feb 06, 2014In this paper the investigation is placed on the hierarchic neuro-fuzzy systems as a possible solution for biped control. An hierarchic controller for biped is presented, it includes several sub-controllers and the whole structure is generated using the adaptive Neuro-fuzzy method. The proposed hierarchic system focus on the key role that the centre of mass position plays in biped robotics, the system sub-controllers generate their outputs taken into consideration the position of that key point.
Toward Intelligent Biped-Humanoids Gaits Generation
Dec 08, 2012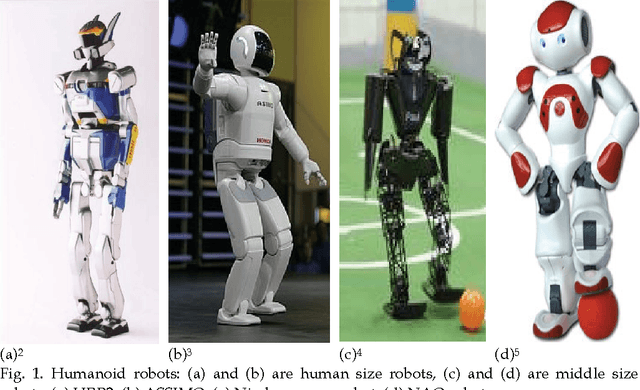
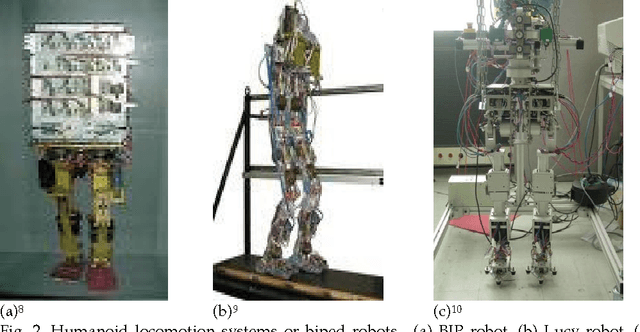
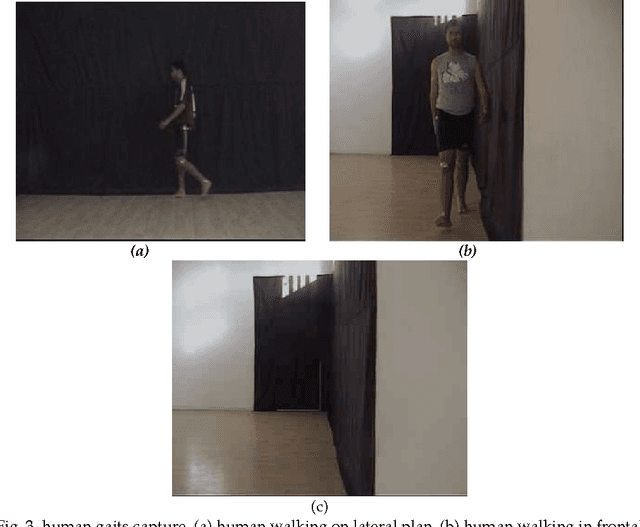
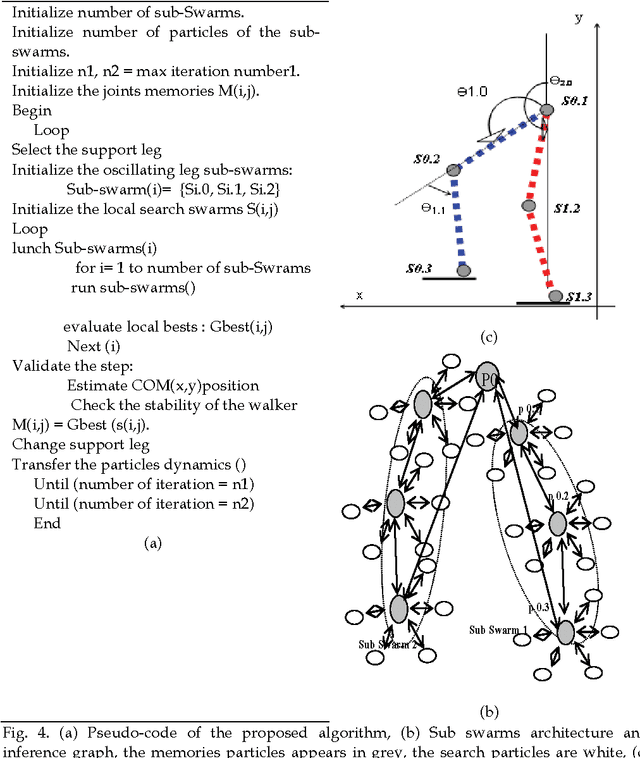
In this chapter we will highlight our experimental studies on natural human walking analysis and introduce a biologically inspired design for simple bipedal locomotion system of humanoid robots. Inspiration comes directly from human walking analysis and human muscles mechanism and control. A hybrid algorithm for walking gaits generation is then proposed as an innovative alternative to classically used kinematics and dynamic equations solving, the gaits include knee, ankle and hip trajectories. The proposed algorithm is an intelligent evolutionary based on particle swarm optimization paradigm. This proposal can be used for small size humanoid robots, with a knee an ankle and a hip and at least six Degrees of Freedom (DOF).
* 15 pages
IK-PSO, PSO Inverse Kinematics Solver with Application to Biped Gait Generation
Dec 08, 2012



This paper describes a new approach allowing the generation of a simplified Biped gait. This approach combines a classical dynamic modeling with an inverse kinematics' solver based on particle swarm optimization, PSO. First, an inverted pendulum, IP, is used to obtain a simplified dynamic model of the robot and to compute the target position of a key point in biped locomotion, the Centre Of Mass, COM. The proposed algorithm, called IK-PSO, Inverse Kinematics PSO, returns and inverse kinematics solution corresponding to that COM respecting the joints constraints. In This paper the inertia weight PSO variant is used to generate a possible solution according to the stability based fitness function and a set of joints motions constraints. The method is applied with success to a leg motion generation. Since based on a pre-calculated COM, that satisfied the biped stability, the proposal allowed also to plan a walk with application on a small size biped robot.
* 7 pages, 7 figures, "Published with International Journal of Computer Applications (IJCA)"