Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Intelligent Biped-Humanoids Gaits Generation
Paper and Code
Dec 08, 2012
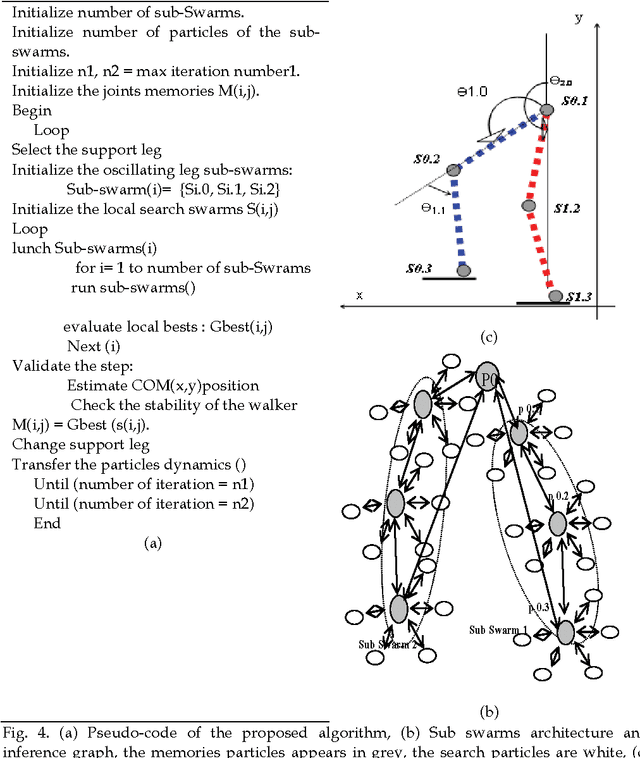
In this chapter we will highlight our experimental studies on natural human walking analysis and introduce a biologically inspired design for simple bipedal locomotion system of humanoid robots. Inspiration comes directly from human walking analysis and human muscles mechanism and control. A hybrid algorithm for walking gaits generation is then proposed as an innovative alternative to classically used kinematics and dynamic equations solving, the gaits include knee, ankle and hip trajectories. The proposed algorithm is an intelligent evolutionary based on particle swarm optimization paradigm. This proposal can be used for small size humanoid robots, with a knee an ankle and a hip and at least six Degrees of Freedom (DOF).
* Nizar Rokbani, Boudour Ammar Cherif and Adel M. Alimi (2009).
Toward Intelligent Biped-Humanoids Gaits Generation, Humanoid Robots, Ben
Choi (Ed.), ISBN: 978-953-7619-44-2, InTech * 15 pages
View paper on