 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImplementation of a Hierarchical fuzzy controller for a biped robot
Dec 29, 2014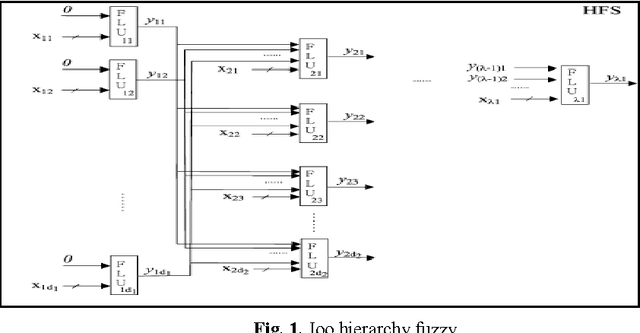
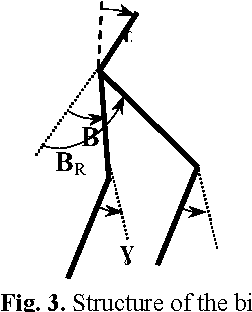
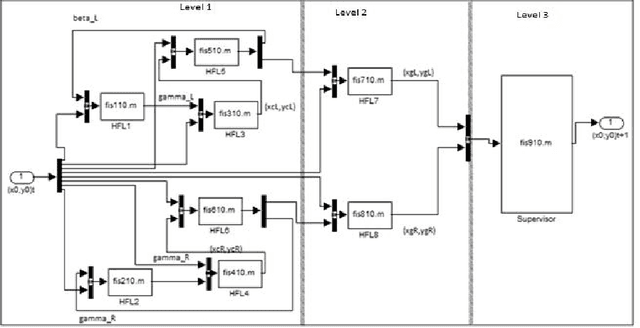
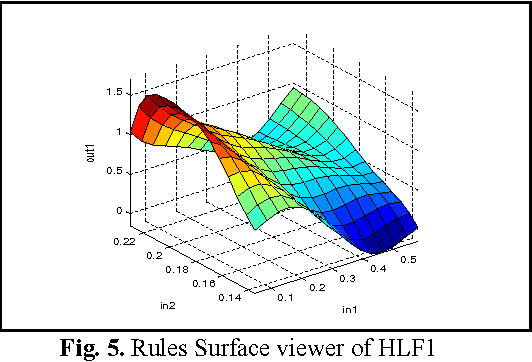
In this paper the design of a control system for a biped robot is described. Control is specified for a walk cycle of the robot. The implementation of the control system was done on Matlab Simulink. In this paper a hierarchical fuzzy logic controller (HFLC) is proposed to control a planar biped walk. The HFLC design is bio-inspired from human locomotion system. The proposed method is applied to control five links planar biped into free area and without obstacles.
A Hierarchical fuzzy controller for a biped robot
Feb 06, 2014In this paper the investigation is placed on the hierarchic neuro-fuzzy systems as a possible solution for biped control. An hierarchic controller for biped is presented, it includes several sub-controllers and the whole structure is generated using the adaptive Neuro-fuzzy method. The proposed hierarchic system focus on the key role that the centre of mass position plays in biped robotics, the system sub-controllers generate their outputs taken into consideration the position of that key point.