Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hierarchical fuzzy controller for a biped robot
Paper and Code
Feb 06, 2014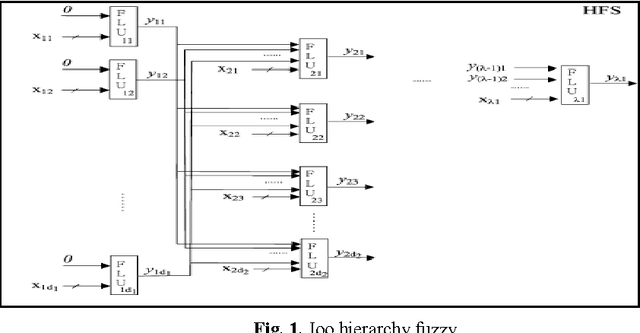
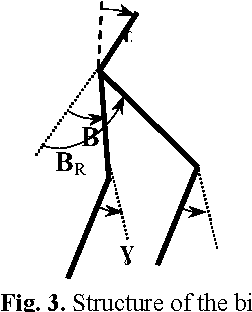
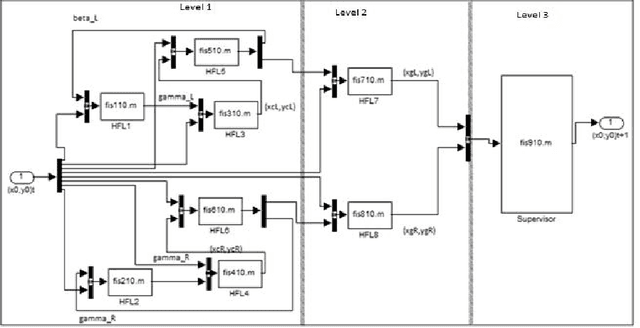
In this paper the investigation is placed on the hierarchic neuro-fuzzy systems as a possible solution for biped control. An hierarchic controller for biped is presented, it includes several sub-controllers and the whole structure is generated using the adaptive Neuro-fuzzy method. The proposed hierarchic system focus on the key role that the centre of mass position plays in biped robotics, the system sub-controllers generate their outputs taken into consideration the position of that key point.
* 4 pages- 9 figures. Proc of The 2013 International Conference on
Individual and Collective Behaviors in Robotics (ICBR 2013)
View paper on