 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGI-NNet \& RGI-NNet: Development of Robotic Grasp Pose Models, Trainable with Large as well as Limited Labelled Training Datasets, under supervised and semi supervised paradigms
Jul 15, 2021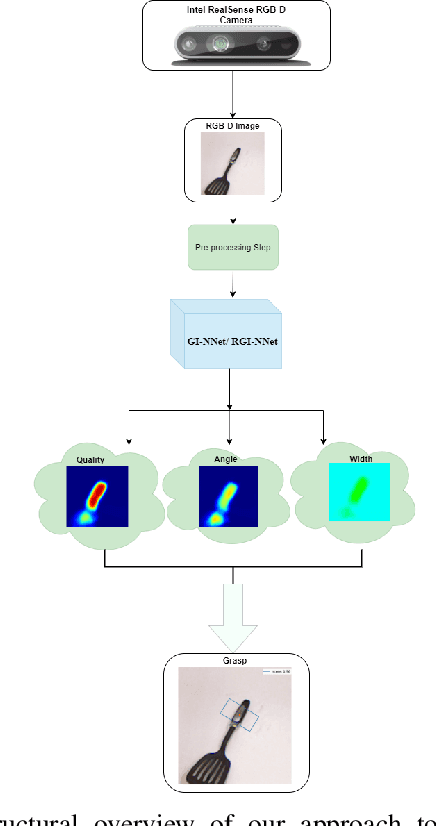

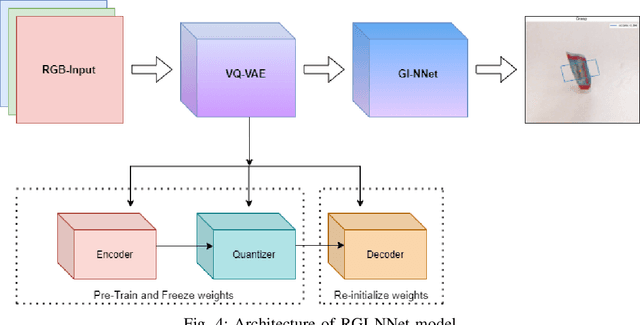
Our way of grasping objects is challenging for efficient, intelligent and optimal grasp by COBOTs. To streamline the process, here we use deep learning techniques to help robots learn to generate and execute appropriate grasps quickly. We developed a Generative Inception Neural Network (GI-NNet) model, capable of generating antipodal robotic grasps on seen as well as unseen objects. It is trained on Cornell Grasping Dataset (CGD) and attained 98.87% grasp pose accuracy for detecting both regular and irregular shaped objects from RGB-Depth (RGB-D) images while requiring only one third of the network trainable parameters as compared to the existing approaches. However, to attain this level of performance the model requires the entire 90% of the available labelled data of CGD keeping only 10% labelled data for testing which makes it vulnerable to poor generalization. Furthermore, getting sufficient and quality labelled dataset is becoming increasingly difficult keeping in pace with the requirement of gigantic networks. To address these issues, we attach our model as a decoder with a semi-supervised learning based architecture known as Vector Quantized Variational Auto Encoder (VQVAE), which works efficiently when trained both with the available labelled and unlabelled data. The proposed model, which we name as Representation based GI-NNet (RGI-NNet), has been trained with various splits of label data on CGD with as minimum as 10% labelled dataset together with latent embedding generated from VQVAE up to 50% labelled data with latent embedding obtained from VQVAE. The performance level, in terms of grasp pose accuracy of RGI-NNet, varies between 92.13% to 95.6% which is far better than several existing models trained with only labelled dataset. For the performance verification of both GI-NNet and RGI-NNet models, we use Anukul (Baxter) hardware cobot.