 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning High-Quality Grasps using Mean Curvature Object Skeletons
Oct 06, 2017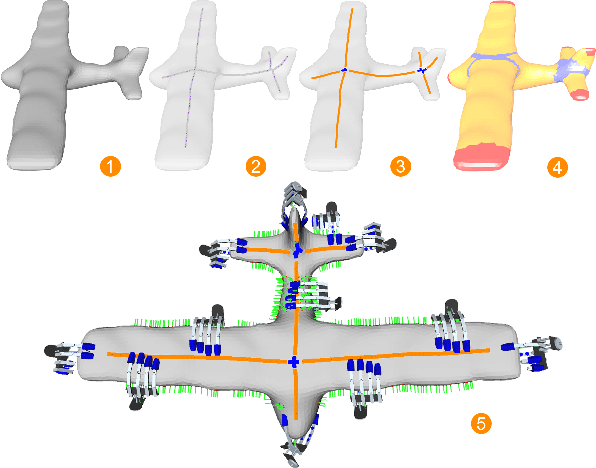
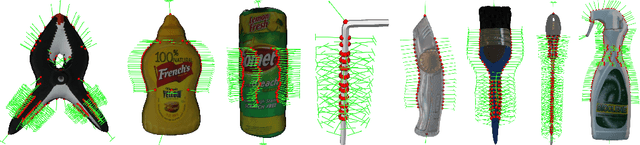
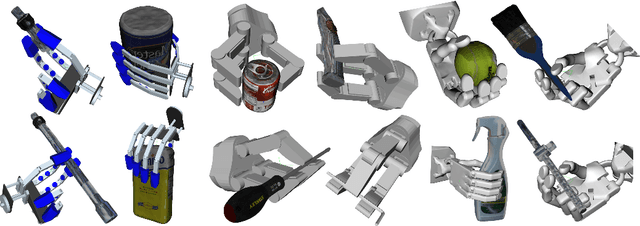
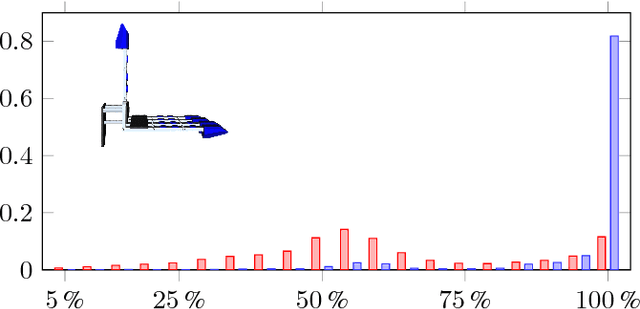
In this work, we present a grasp planner which integrates two sources of information to generate robust grasps for a robotic hand. First, the topological information of the object model is incorporated by building the mean curvature skeleton and segmenting the object accordingly in order to identify object regions which are suitable for applying a grasp. Second, the local surface structure is investigated to construct feasible and robust grasping poses by aligning the hand according to the local object shape. We show how this information can be used to derive different grasping strategies, which also allows to distinguish between precision and power grasps. We applied the approach to a wide variety of object models of the KIT and the YCB real-world object model databases and evaluated the approach with several robotic hands. The results show that the skeleton-based grasp planner is capable to autonomously generate high-quality grasps in an efficient manner. In addition, we evaluate how robust the planned grasps are against hand positioning errors as they occur in real-world applications due to perception and actuation inaccuracies. The evaluation shows that the majority of the generated grasps are of high quality since they can be successfully applied even when the hand is not exactly positioned.
Resource Prediction for Humanoid Robots
May 12, 2014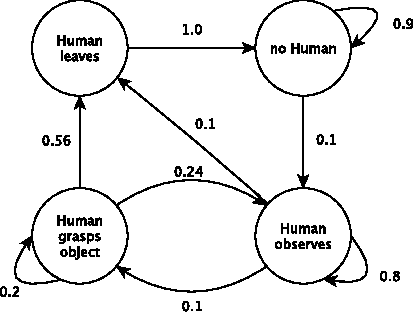
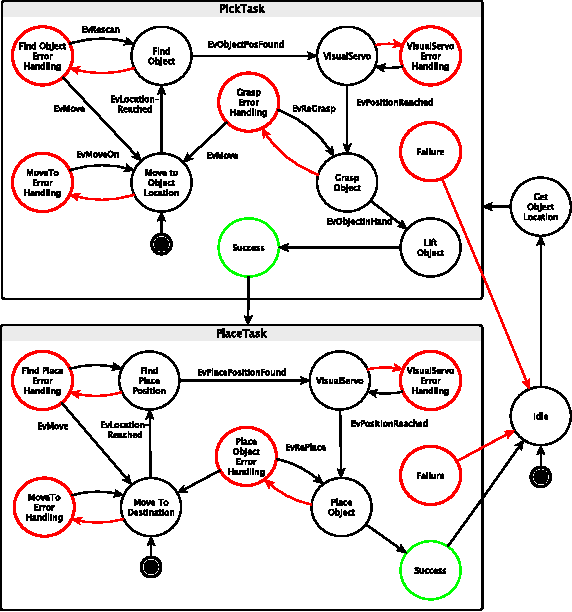
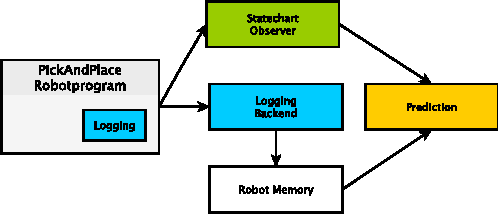
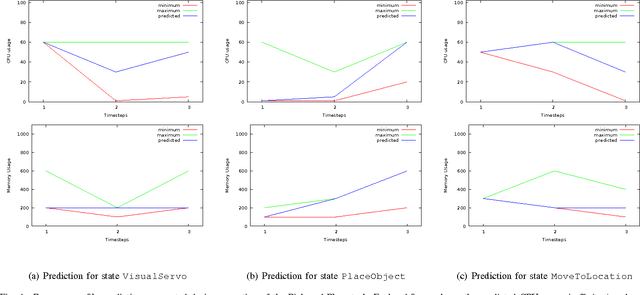
Humanoid robots are designed to operate in human centered environments where they execute a multitude of challenging tasks, each differing in complexity, resource requirements, and execution time. In such highly dynamic surroundings it is desirable to anticipate upcoming situations in order to predict future resource requirements such as CPU or memory usage. Resource prediction information is essential for detecting upcoming resource bottlenecks or conflicts and can be used enhance resource negotiation processes or to perform speculative resource allocation. In this paper we present a prediction model based on Markov chains for predicting the behavior of the humanoid robot ARMAR-III in human robot interaction scenarios. Robot state information required by the prediction algorithm is gathered through self-monitoring and combined with environmental context information. Adding resource profiles allows generating probability distributions of possible future resource demands. Online learning of model parameters is made possible through disclosure mechanisms provided by the robot framework ArmarX.