 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResource Prediction for Humanoid Robots
May 12, 2014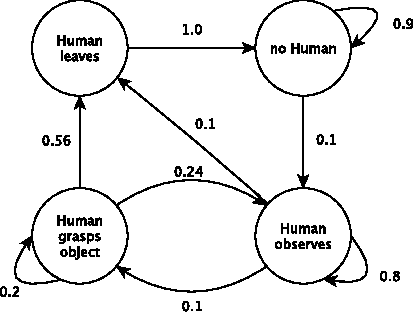
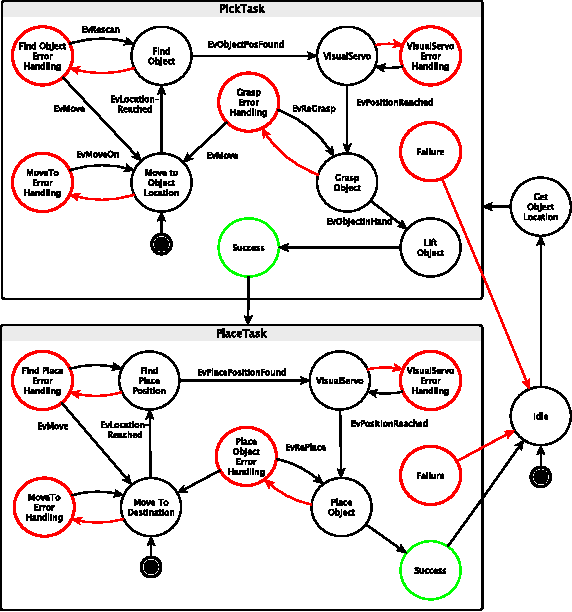
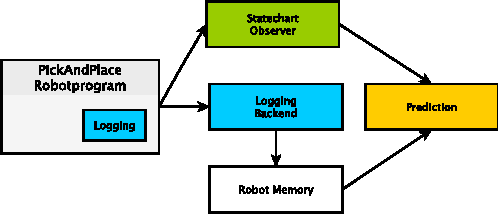
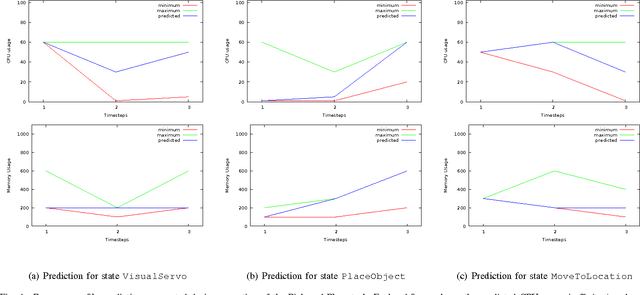
Humanoid robots are designed to operate in human centered environments where they execute a multitude of challenging tasks, each differing in complexity, resource requirements, and execution time. In such highly dynamic surroundings it is desirable to anticipate upcoming situations in order to predict future resource requirements such as CPU or memory usage. Resource prediction information is essential for detecting upcoming resource bottlenecks or conflicts and can be used enhance resource negotiation processes or to perform speculative resource allocation. In this paper we present a prediction model based on Markov chains for predicting the behavior of the humanoid robot ARMAR-III in human robot interaction scenarios. Robot state information required by the prediction algorithm is gathered through self-monitoring and combined with environmental context information. Adding resource profiles allows generating probability distributions of possible future resource demands. Online learning of model parameters is made possible through disclosure mechanisms provided by the robot framework ArmarX.
Resource-Aware Programming for Robotic Vision
May 12, 2014
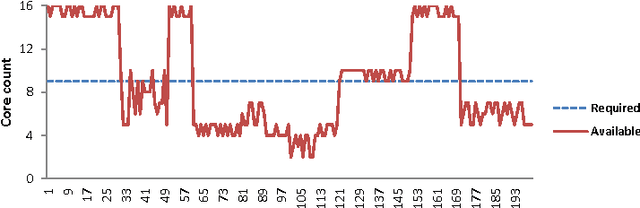
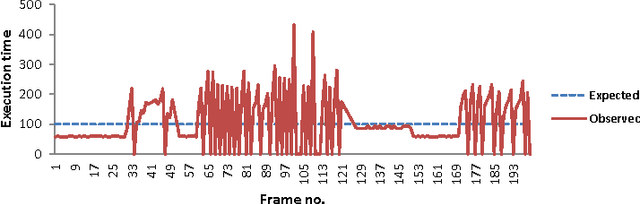
Humanoid robots are designed to operate in human centered environments. They face changing, dynamic environments in which they need to fulfill a multitude of challenging tasks. Such tasks differ in complexity, resource requirements, and execution time. Latest computer architectures of humanoid robots consist of several industrial PCs containing single- or dual-core processors. According to the SIA roadmap for semiconductors, many-core chips with hundreds to thousands of cores are expected to be available in the next decade. Utilizing the full power of a chip with huge amounts of resources requires new computing paradigms and methodologies. In this paper, we analyze a resource-aware computing methodology named Invasive Computing, to address these challenges. The benefits and limitations of the new programming model is analyzed using two widely used computer vision algorithms, the Harris Corner detector and SIFT (Scale Invariant Feature Transform) feature matching. The result indicate that the new programming model together with the extensions within the application layer, makes them highly adaptable; leading to better quality in the results obtained.