 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmotional Storytelling using Virtual and Robotic Agents
Jul 18, 2016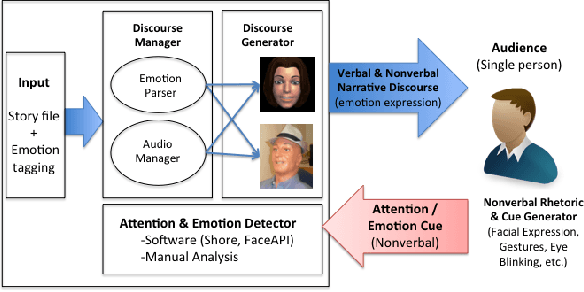
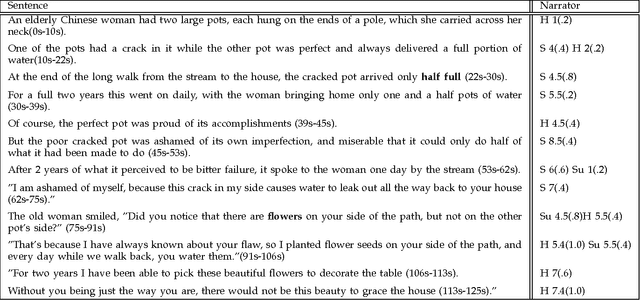
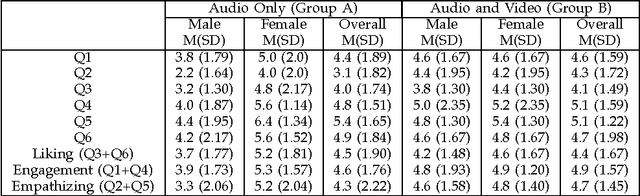
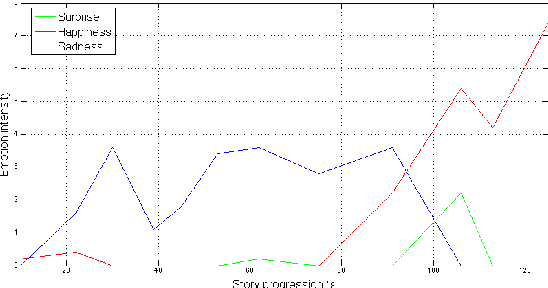
In order to create effective storytelling agents three fundamental questions must be answered: first, is a physically embodied agent preferable to a virtual agent or a voice-only narration? Second, does a human voice have an advantage over a synthesised voice? Third, how should the emotional trajectory of the different characters in a story be related to a storyteller's facial expressions during storytelling time, and how does this correlate with the apparent emotions on the faces of the listeners? The results of two specially designed studies indicate that the physically embodied robot produces more attention to the listener as compared to a virtual embodiment, that a human voice is preferable over the current state of the art of text-to-speech, and that there is a complex yet interesting relation between the emotion lines of the story, the facial expressions of the narrating agent, and the emotions of the listener, and that the empathising of the listener is evident through its facial expressions. This work constitutes an important step towards emotional storytelling robots that can observe their listeners and adapt their style in order to maximise their effectiveness.
A Review of Verbal and Non-Verbal Human-Robot Interactive Communication
Jan 20, 2014In this paper, an overview of human-robot interactive communication is presented, covering verbal as well as non-verbal aspects of human-robot interaction. Following a historical introduction, and motivation towards fluid human-robot communication, ten desiderata are proposed, which provide an organizational axis both of recent as well as of future research on human-robot communication. Then, the ten desiderata are examined in detail, culminating to a unifying discussion, and a forward-looking conclusion.
FaceBots: Steps Towards Enhanced Long-Term Human-Robot Interaction by Utilizing and Publishing Online Social Information
Apr 30, 2009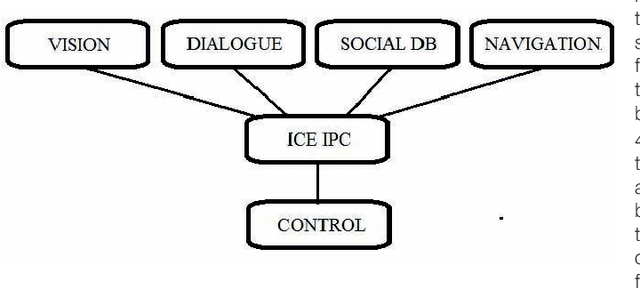

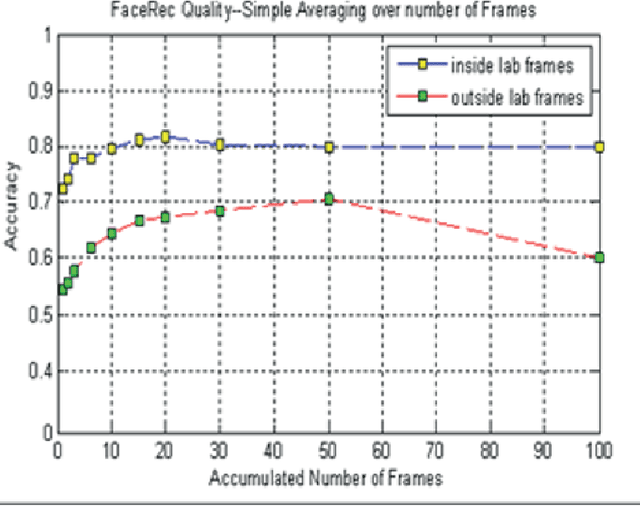
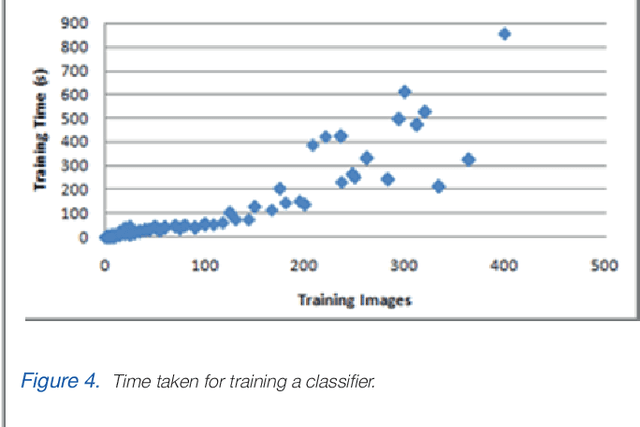
Our project aims at supporting the creation of sustainable and meaningful longer-term human-robot relationships through the creation of embodied robots with face recognition and natural language dialogue capabilities, which exploit and publish social information available on the web (Facebook). Our main underlying experimental hypothesis is that such relationships can be significantly enhanced if the human and the robot are gradually creating a pool of shared episodic memories that they can co-refer to (shared memories), and if they are both embedded in a social web of other humans and robots they both know and encounter (shared friends). In this paper, we are presenting such a robot, which as we will see achieves two significant novelties.