 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCineFilter: Unsupervised Filtering for Real Time Autonomous Camera Systems
Dec 11, 2019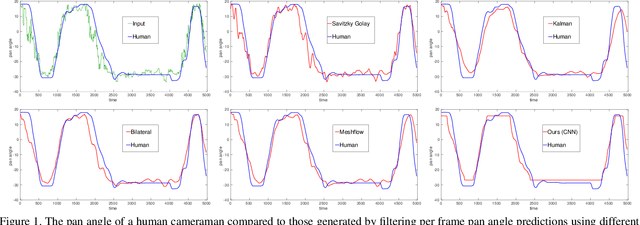
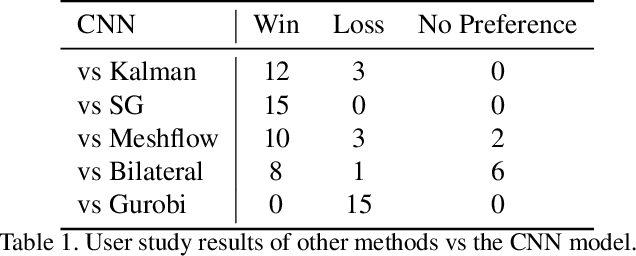
Learning to mimic the smooth and deliberate camera movement of a human cameraman is an essential requirement for autonomous camera systems. This paper presents a novel formulation for online and real-time estimation of smooth camera trajectories. Many works have focused on global optimization of the trajectory to produce an offline output. Some recent works have tried to extend this to the online setting, but lack either in the quality of the camera trajectories or need large labeled datasets to train their supervised model. We propose two models, one a convex optimization based approach and another a CNN based model, both of which can exploit the temporal trends in the camera behavior. Our model is built in an unsupervised way without any ground truth trajectories and is robust to noisy outliers. We evaluate our models on two different settings namely a basketball dataset and a stage performance dataset and compare against multiple baselines and past approaches. Our models outperform other methods on quantitative and qualitative metrics and produce smooth camera trajectories that are motivated by cinematographic principles. These models can also be easily adopted to run in real-time with a low computational cost, making them fit for a variety of applications.