 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject recognition for robotics from tactile time series data utilising different neural network architectures
Sep 09, 2021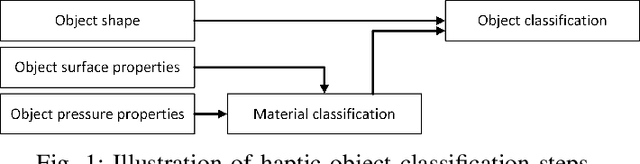
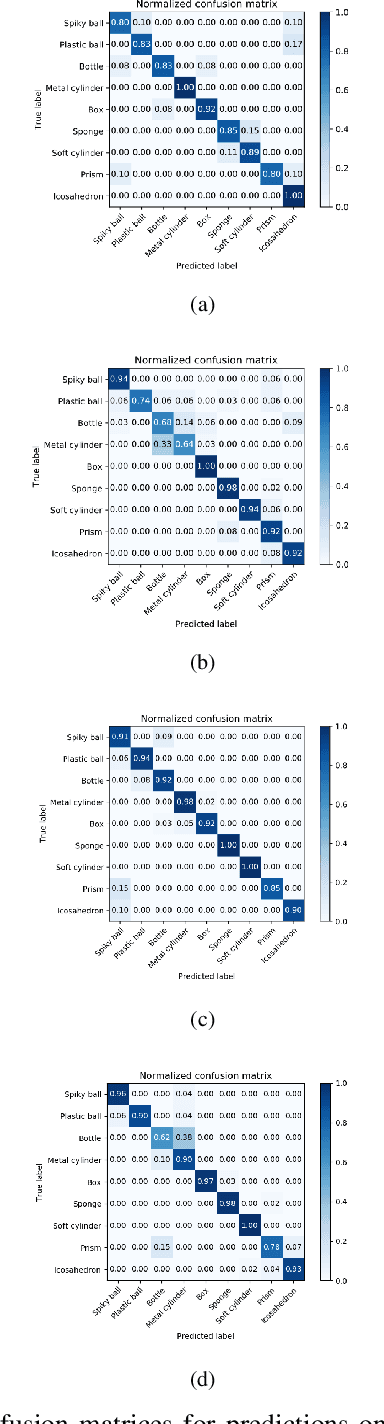
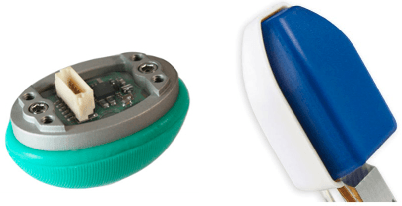
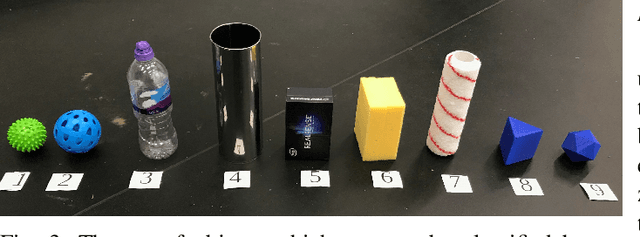
Robots need to exploit high-quality information on grasped objects to interact with the physical environment. Haptic data can therefore be used for supplementing the visual modality. This paper investigates the use of Convolutional Neural Networks (CNN) and Long-Short Term Memory (LSTM) neural network architectures for object classification on Spatio-temporal tactile grasping data. Furthermore, we compared these methods using data from two different fingertip sensors (namely the BioTac SP and WTS-FT) in the same physical setup, allowing for a realistic comparison across methods and sensors for the same tactile object classification dataset. Additionally, we propose a way to create more training examples from the recorded data. The results show that the proposed method improves the maximum accuracy from 82.4% (BioTac SP fingertips) and 90.7% (WTS-FT fingertips) with complete time-series data to about 94% for both sensor types.
Strawberry Detection Using a Heterogeneous Multi-Processor Platform
Nov 07, 2020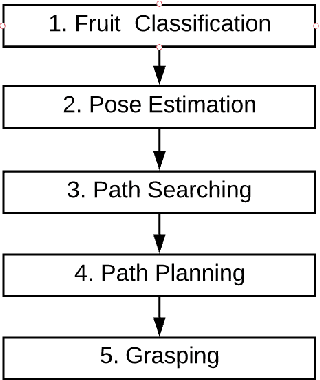
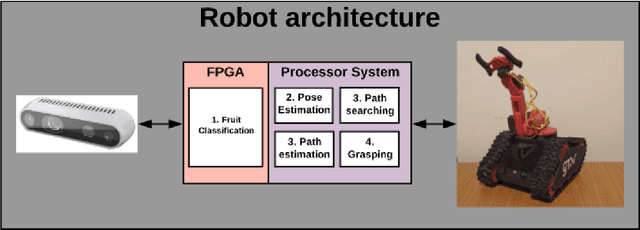
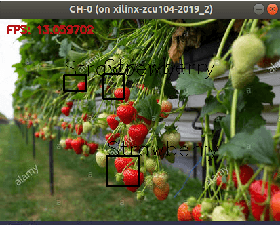
Over the last few years, the number of precision farming projects has increased specifically in harvesting robots and many of which have made continued progress from identifying crops to grasping the desired fruit or vegetable. One of the most common issues found in precision farming projects is that successful application is heavily dependent not just on identifying the fruit but also on ensuring that localisation allows for accurate navigation. These issues become significant factors when the robot is not operating in a prearranged environment, or when vegetation becomes too thick, thus covering crop. Moreover, running a state-of-the-art deep learning algorithm on an embedded platform is also very challenging, resulting most of the times in low frame rates. This paper proposes using the You Only Look Once version 3 (YOLOv3) Convolutional Neural Network (CNN) in combination with utilising image processing techniques for the application of precision farming robots targeting strawberry detection, accelerated on a heterogeneous multiprocessor platform. The results show a performance acceleration by five times when implemented on a Field-Programmable Gate Array (FPGA) when compared with the same algorithm running on the processor side with an accuracy of 78.3\% over the test set comprised of 146 images.