 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Complexity of Object Detection on Real-world Public Transportation Images for Social Distancing Measurement
Feb 14, 2022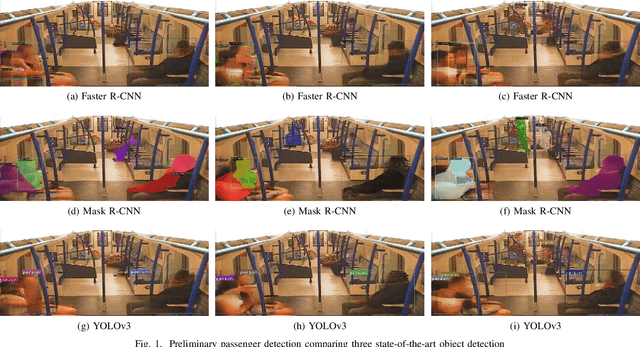
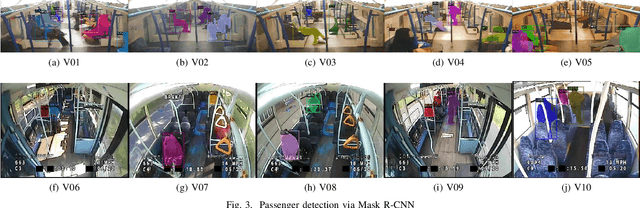
Social distancing in public spaces has become an essential aspect in helping to reduce the impact of the COVID-19 pandemic. Exploiting recent advances in machine learning, there have been many studies in the literature implementing social distancing via object detection through the use of surveillance cameras in public spaces. However, to date, there has been no study of social distance measurement on public transport. The public transport setting has some unique challenges, including some low-resolution images and camera locations that can lead to the partial occlusion of passengers, which make it challenging to perform accurate detection. Thus, in this paper, we investigate the challenges of performing accurate social distance measurement on public transportation. We benchmark several state-of-the-art object detection algorithms using real-world footage taken from the London Underground and bus network. The work highlights the complexity of performing social distancing measurement on images from current public transportation onboard cameras. Further, exploiting domain knowledge of expected passenger behaviour, we attempt to improve the quality of the detections using various strategies and show improvement over using vanilla object detection alone.
Using Variable Natural Environment Brain-Computer Interface Stimuli for Real-time Humanoid Robot Navigation
Mar 01, 2019



This paper addresses the challenge of humanoid robot teleoperation in a natural indoor environment via a Brain-Computer Interface (BCI). We leverage deep Convolutional Neural Network (CNN) based image and signal understanding to facilitate both real-time bject detection and dry-Electroencephalography (EEG) based human cortical brain bio-signals decoding. We employ recent advances in dry-EEG technology to stream and collect the cortical waveforms from subjects while they fixate on variable Steady State Visual Evoked Potential (SSVEP) stimuli generated directly from the environment the robot is navigating. To these ends, we propose the use of novel variable BCI stimuli by utilising the real-time video streamed via the on-board robot camera as visual input for SSVEP, where the CNN detected natural scene objects are altered and flickered with differing frequencies (10Hz, 12Hz and 15Hz). These stimuli are not akin to traditional stimuli - as both the dimensions of the flicker regions and their on-screen position changes depending on the scene objects detected. On-screen object selection via such a dry-EEG enabled SSVEP methodology, facilitates the on-line decoding of human cortical brain signals, via a specialised secondary CNN, directly into teleoperation robot commands (approach object, move in a specific direction: right, left or back). This SSVEP decoding model is trained via a priori offline experimental data in which very similar visual input is present for all subjects. The resulting classification demonstrates high performance with mean accuracy of 85% for the real-time robot navigation experiment across multiple test subjects.