 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating MEDIRL: A Replication and Ablation Study of Maximum Entropy Deep Inverse Reinforcement Learning for Human Social Navigation
Jun 03, 2024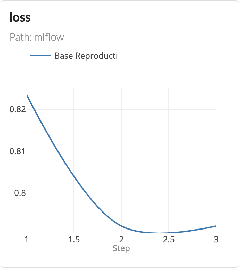
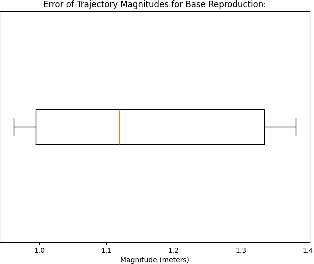
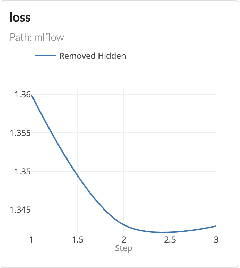
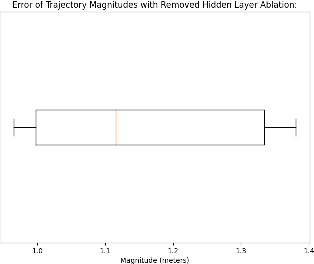
In this study, we enhance the Maximum Entropy Deep Inverse Reinforcement Learning (MEDIRL) framework, targeting its application in human robot interaction (HRI) for modeling pedestrian behavior in crowded environments. Our work is grounded in the pioneering research by Fahad, Chen, and Guo, and aims to elevate MEDIRL's efficacy in real world HRI settings. We replicated the original MEDIRL model and conducted detailed ablation studies, focusing on key model components like learning rates, state dimensions, and network layers. Our findings reveal the effectiveness of a two dimensional state representation over three dimensional approach, significantly improving model accuracy for pedestrian behavior prediction in HRI scenarios. These results not only demonstrate MEDIRL's enhanced performance but also offer valuable insights for future HRI system development, emphasizing the importance of model customization to specific environmental contexts. Our research contributes to advancing the field of socially intelligent navigation systems, promoting more intuitive and safer human robot interactions.
MIRACLE: Inverse Reinforcement and Curriculum Learning Model for Human-inspired Mobile Robot Navigation
Dec 07, 2023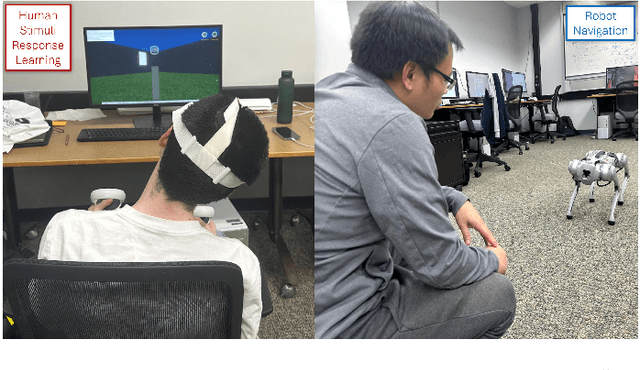
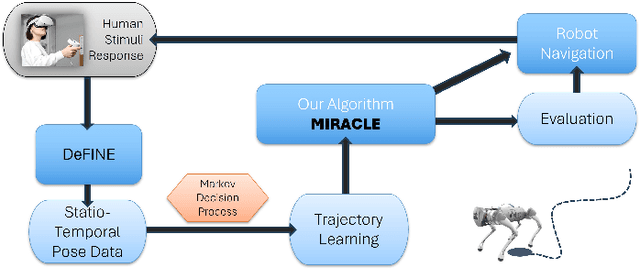
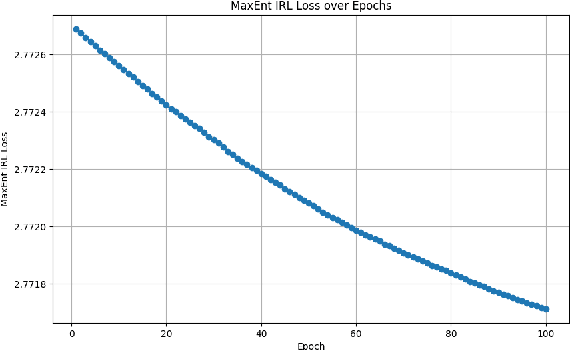
In emergency scenarios, mobile robots must navigate like humans, interpreting stimuli to locate potential victims rapidly without interfering with first responders. Existing socially-aware navigation algorithms face computational and adaptability challenges. To overcome these, we propose a solution, MIRACLE -- an inverse reinforcement and curriculum learning model, that employs gamified learning to gather stimuli-driven human navigational data. This data is then used to train a Deep Inverse Maximum Entropy Reinforcement Learning model, reducing reliance on demonstrator abilities. Testing reveals a low loss of 2.7717 within a 400-sized environment, signifying human-like response replication. Current databases lack comprehensive stimuli-driven data, necessitating our approach. By doing so, we enable robots to navigate emergency situations with human-like perception, enhancing their life-saving capabilities.