 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMIRACLE: Inverse Reinforcement and Curriculum Learning Model for Human-inspired Mobile Robot Navigation
Paper and Code
Dec 07, 2023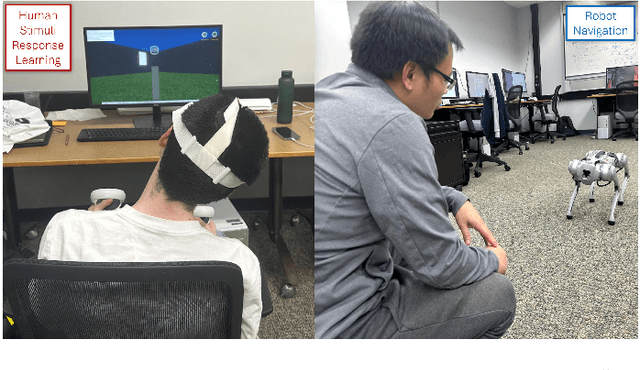
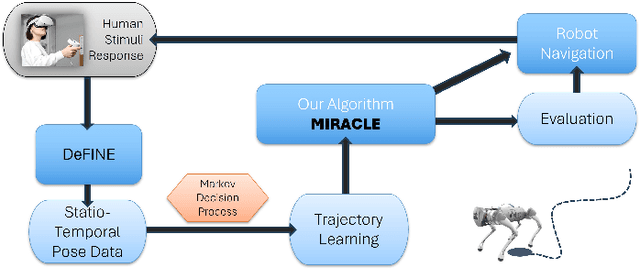
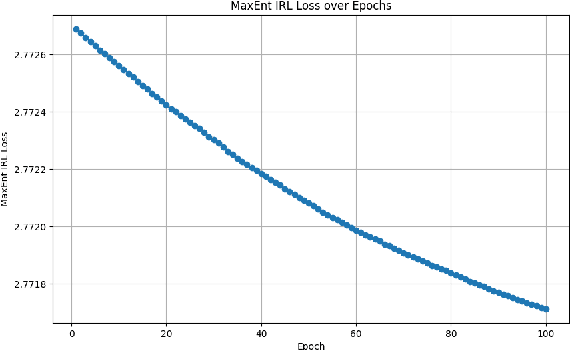
In emergency scenarios, mobile robots must navigate like humans, interpreting stimuli to locate potential victims rapidly without interfering with first responders. Existing socially-aware navigation algorithms face computational and adaptability challenges. To overcome these, we propose a solution, MIRACLE -- an inverse reinforcement and curriculum learning model, that employs gamified learning to gather stimuli-driven human navigational data. This data is then used to train a Deep Inverse Maximum Entropy Reinforcement Learning model, reducing reliance on demonstrator abilities. Testing reveals a low loss of 2.7717 within a 400-sized environment, signifying human-like response replication. Current databases lack comprehensive stimuli-driven data, necessitating our approach. By doing so, we enable robots to navigate emergency situations with human-like perception, enhancing their life-saving capabilities.