 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Geometry-Aware Augmented Reality in Minimally Invasive Surgery
Aug 03, 2017


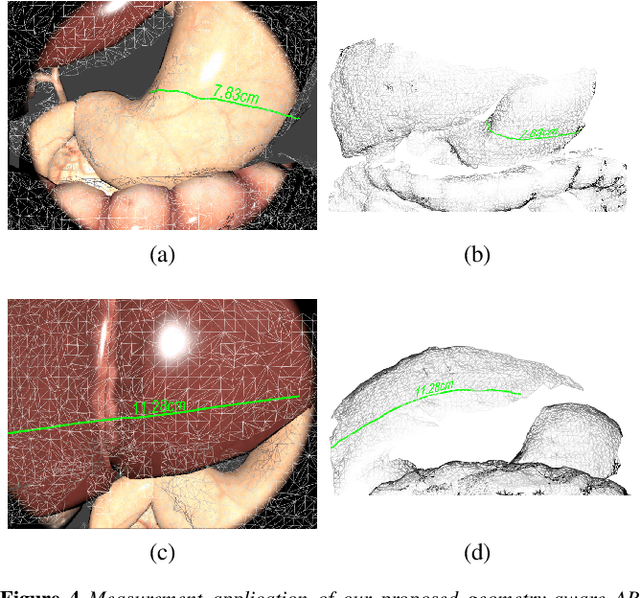
The potential of Augmented Reality (AR) technology to assist minimally invasive surgeries (MIS) lies in its computational performance and accuracy in dealing with challenging MIS scenes. Even with the latest hardware and software technologies, achieving both real-time and accurate augmented information overlay in MIS is still a formidable task. In this paper, we present a novel real-time AR framework for MIS that achieves interactive geometric aware augmented reality in endoscopic surgery with stereo views. Our framework tracks the movement of the endoscopic camera and simultaneously reconstructs a dense geometric mesh of the MIS scene. The movement of the camera is predicted by minimising the re-projection error to achieve a fast tracking performance, while the 3D mesh is incrementally built by a dense zero mean normalised cross correlation stereo matching method to improve the accuracy of the surface reconstruction. Our proposed system does not require any prior template or pre-operative scan and can infer the geometric information intra-operatively in real-time. With the geometric information available, our proposed AR framework is able to interactively add annotations, localisation of tumours and vessels, and measurement labelling with greater precision and accuracy compared with the state of the art approaches.
Recent Developments and Future Challenges in Medical Mixed Reality
Aug 03, 2017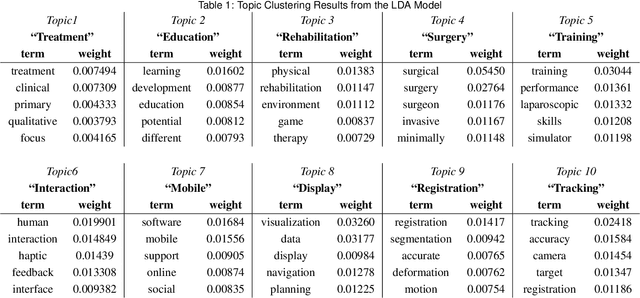
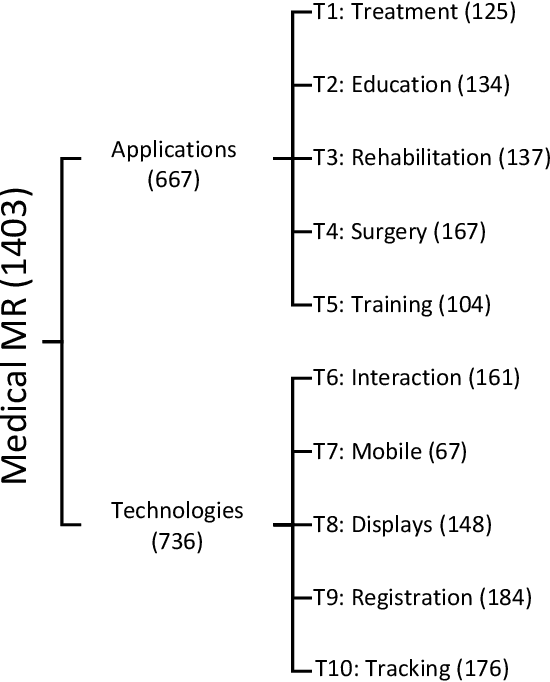
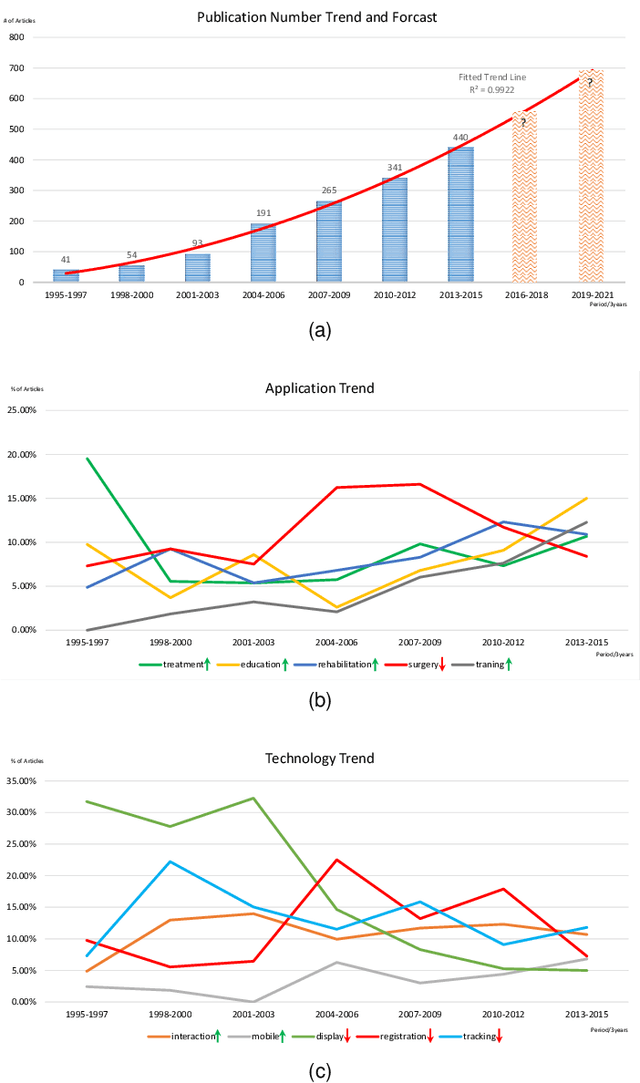

Mixed Reality (MR) is of increasing interest within technology-driven modern medicine but is not yet used in everyday practice. This situation is changing rapidly, however, and this paper explores the emergence of MR technology and the importance of its utility within medical applications. A classification of medical MR has been obtained by applying an unbiased text mining method to a database of 1,403 relevant research papers published over the last two decades. The classification results reveal a taxonomy for the development of medical MR research during this period as well as suggesting future trends. We then use the classification to analyse the technology and applications developed in the last five years. Our objective is to aid researchers to focus on the areas where technology advancements in medical MR are most needed, as well as providing medical practitioners with a useful source of reference.
Augmented Reality for Depth Cues in Monocular Minimally Invasive Surgery
Mar 01, 2017


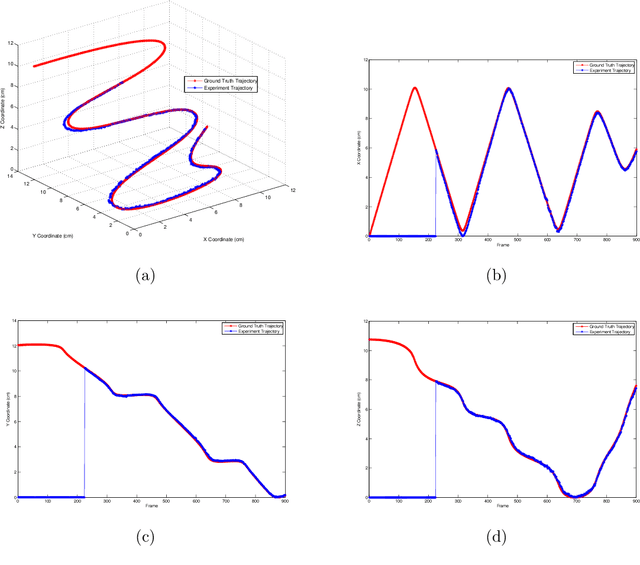
One of the major challenges in Minimally Invasive Surgery (MIS) such as laparoscopy is the lack of depth perception. In recent years, laparoscopic scene tracking and surface reconstruction has been a focus of investigation to provide rich additional information to aid the surgical process and compensate for the depth perception issue. However, robust 3D surface reconstruction and augmented reality with depth perception on the reconstructed scene are yet to be reported. This paper presents our work in this area. First, we adopt a state-of-the-art visual simultaneous localization and mapping (SLAM) framework - ORB-SLAM - and extend the algorithm for use in MIS scenes for reliable endoscopic camera tracking and salient point mapping. We then develop a robust global 3D surface reconstruction frame- work based on the sparse point clouds extracted from the SLAM framework. Our approach is to combine an outlier removal filter within a Moving Least Squares smoothing algorithm and then employ Poisson surface reconstruction to obtain smooth surfaces from the unstructured sparse point cloud. Our proposed method has been quantitatively evaluated compared with ground-truth camera trajectories and the organ model surface we used to render the synthetic simulation videos. In vivo laparoscopic videos used in the tests have demonstrated the robustness and accuracy of our proposed framework on both camera tracking and surface reconstruction, illustrating the potential of our algorithm for depth augmentation and depth-corrected augmented reality in MIS with monocular endoscopes.