 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Geometry-Aware Augmented Reality in Minimally Invasive Surgery
Paper and Code
Aug 03, 2017


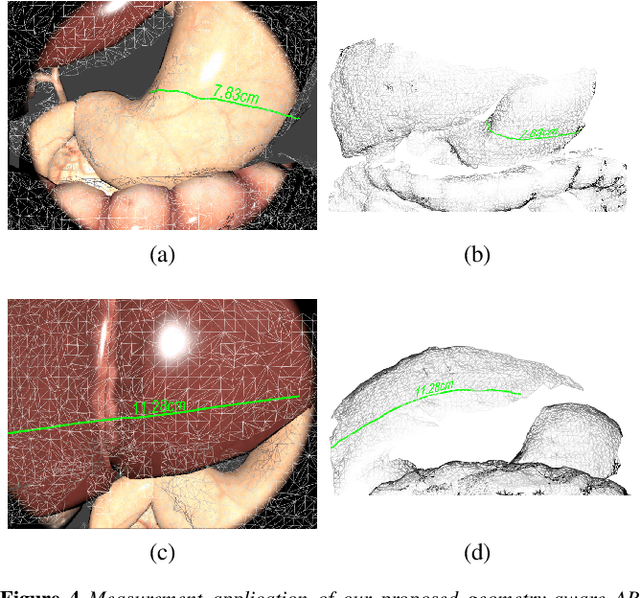
The potential of Augmented Reality (AR) technology to assist minimally invasive surgeries (MIS) lies in its computational performance and accuracy in dealing with challenging MIS scenes. Even with the latest hardware and software technologies, achieving both real-time and accurate augmented information overlay in MIS is still a formidable task. In this paper, we present a novel real-time AR framework for MIS that achieves interactive geometric aware augmented reality in endoscopic surgery with stereo views. Our framework tracks the movement of the endoscopic camera and simultaneously reconstructs a dense geometric mesh of the MIS scene. The movement of the camera is predicted by minimising the re-projection error to achieve a fast tracking performance, while the 3D mesh is incrementally built by a dense zero mean normalised cross correlation stereo matching method to improve the accuracy of the surface reconstruction. Our proposed system does not require any prior template or pre-operative scan and can infer the geometric information intra-operatively in real-time. With the geometric information available, our proposed AR framework is able to interactively add annotations, localisation of tumours and vessels, and measurement labelling with greater precision and accuracy compared with the state of the art approaches.