 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Real-World Traffic Data to Relevant Critical Scenarios
Dec 08, 2025The reliable operation of autonomous vehicles, automated driving functions, and advanced driver assistance systems across a wide range of relevant scenarios is critical for their development and deployment. Identifying a near-complete set of relevant driving scenarios for such functionalities is challenging due to numerous degrees of freedom involved, each affecting the outcomes of the driving scenario differently. Moreover, with increasing technical complexity of new functionalities, the number of potentially relevant, particularly "unknown unsafe" scenarios is increasing. To enhance validation efficiency, it is essential to identify relevant scenarios in advance, starting with simpler domains like highways before moving to more complex environments such as urban traffic. To address this, this paper focuses on analyzing lane change scenarios in highway traffic, which involve multiple degrees of freedom and present numerous safetyrelevant scenarios. We describe the process of data acquisition and processing of real-world data from public highway traffic, followed by the application of criticality measures on trajectory data to evaluate scenarios, as conducted within the AVEAS project (www.aveas.org). By linking the calculated measures to specific lane change driving scenarios and the conditions under which the data was collected, we facilitate the identification of safetyrelevant driving scenarios for various applications. Further, to tackle the extensive range of "unknown unsafe" scenarios, we propose a way to generate relevant scenarios by creating synthetic scenarios based on recorded ones. Consequently, we demonstrate and evaluate a processing chain that enables the identification of safety-relevant scenarios, the development of data-driven methods for extracting these scenarios, and the generation of synthetic critical scenarios via sampling on highways.
A Two-Level Stochastic Model for the Lateral Movement of Vehicles Within Their Lane Under Homogeneous Traffic Conditions
May 27, 2024The lateral position of vehicles within their lane is a decisive factor for the range of vision of vehicle sensors. This, in turn, is crucial for a vehicle's ability to perceive its environment and gain a high situational awareness by processing the collected information. When aiming for increasing levels of vehicle autonomy, this situational awareness becomes more and more important. Thus, when validating an autonomous driving function the representativeness of the submicroscopic behavior such as the lateral offset has to be ensured. With simulations being an essential part of the validation of autonomous driving functions, models describing these phenomena are required. Possible applications are the enhancement of microscopic traffic simulations and the maneuver-based approach for scenario-based testing. This paper presents a two-level stochastic approach to model the lateral movement of vehicles within their lane during road-following maneuvers under homogeneous traffic conditions. A Markov model generates the coarse lateral offset profile. It is superposed with a noise model for the fine movements. Both models are set up using real-world data. The evaluation of the model shows promising qualitative and quantitative results, the potential for enhancements and extreme low computation times (10000 times faster than real time).
* 8 pages, 12 figures
Literature Review on Maneuver-Based Scenario Description for Automated Driving Simulations
May 14, 2024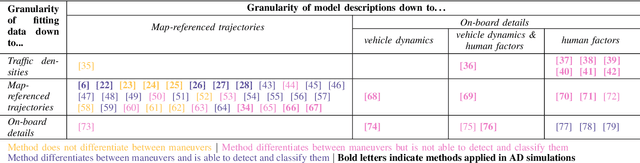
The increasing complexity of automated driving functions and their growing operational design domains imply more demanding requirements on their validation. Classical methods such as field tests or formal analyses are not sufficient anymore and need to be complemented by simulations. For simulations, the standard approach is scenario-based testing, as opposed to distance-based testing primarily performed in field tests. Currently, the time evolution of specific scenarios is mainly described using trajectories, which limit or at least hamper generalizations towards variations. As an alternative, maneuver-based approaches have been proposed. We shed light on the state of the art and available foundations for this new method through a literature review of early and recent works related to maneuver-based scenario description. It includes related modeling approaches originally developed for other applications. Current limitations and research gaps are identified.
* 8 pages, 1 figure, 1 table
A Joint Approach Towards Data-Driven Virtual Testing for Automated Driving: The AVEAS Project
May 10, 2024



With growing complexity and responsibility of automated driving functions in road traffic and growing scope of their operational design domains, there is increasing demand for covering significant parts of development, validation, and verification via virtual environments and simulation models. If, however, simulations are meant not only to augment real-world experiments, but to replace them, quantitative approaches are required that measure to what degree and under which preconditions simulation models adequately represent reality, and thus allow their usage for virtual testing of driving functions. Especially in research and development areas related to the safety impacts of the "open world", there is a significant shortage of real-world data to parametrize and/or validate simulations - especially with respect to the behavior of human traffic participants, whom automated vehicles will meet in mixed traffic. This paper presents the intermediate results of the German AVEAS research project (www.aveas.org) which aims at developing methods and metrics for the harmonized, systematic, and scalable acquisition of real-world data for virtual verification and validation of advanced driver assistance systems and automated driving, and establishing an online database following the FAIR principles.
* 6 pages, 5 figures, 2 tables
An Approach to Systematic Data Acquisition and Data-Driven Simulation for the Safety Testing of Automated Driving Functions
May 02, 2024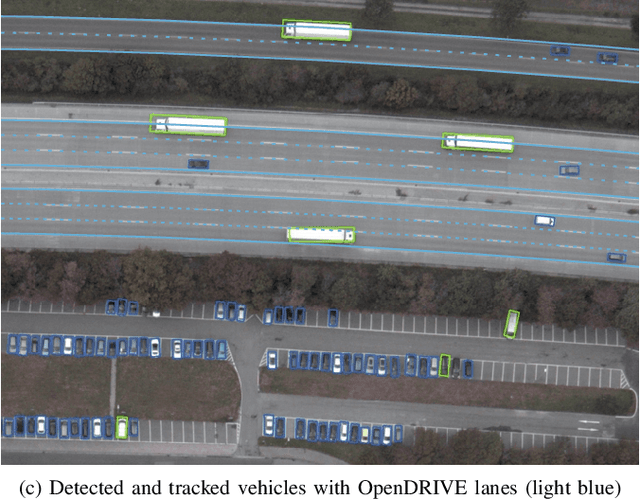
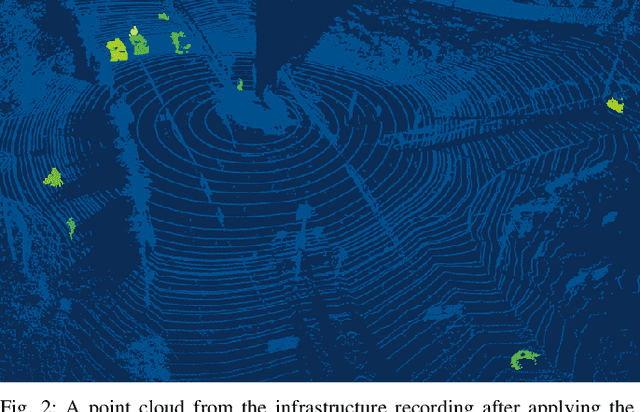
With growing complexity and criticality of automated driving functions in road traffic and their operational design domains (ODD), there is increasing demand for covering significant proportions of development, validation, and verification in virtual environments and through simulation models. If, however, simulations are meant not only to augment real-world experiments, but to replace them, quantitative approaches are required that measure to what degree and under which preconditions simulation models adequately represent reality, and thus, using their results accordingly. Especially in R&D areas related to the safety impact of the "open world", there is a significant shortage of real-world data to parameterize and/or validate simulations - especially with respect to the behavior of human traffic participants, whom automated driving functions will meet in mixed traffic. We present an approach to systematically acquire data in public traffic by heterogeneous means, transform it into a unified representation, and use it to automatically parameterize traffic behavior models for use in data-driven virtual validation of automated driving functions.