 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCamera-Only 3D Panoptic Scene Completion for Autonomous Driving through Differentiable Object Shapes
May 14, 2025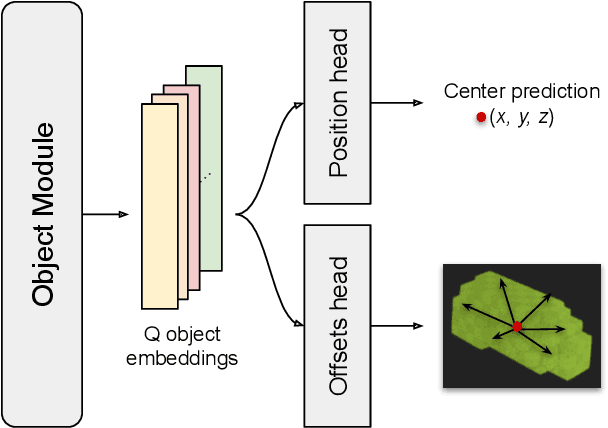
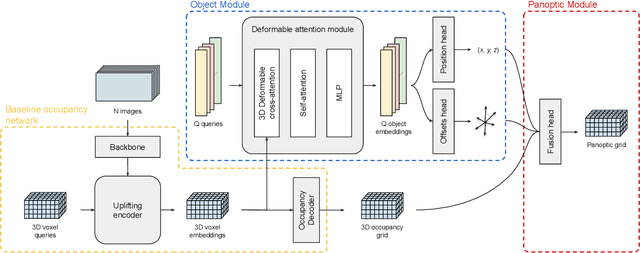
Autonomous vehicles need a complete map of their surroundings to plan and act. This has sparked research into the tasks of 3D occupancy prediction, 3D scene completion, and 3D panoptic scene completion, which predict a dense map of the ego vehicle's surroundings as a voxel grid. Scene completion extends occupancy prediction by predicting occluded regions of the voxel grid, and panoptic scene completion further extends this task by also distinguishing object instances within the same class; both aspects are crucial for path planning and decision-making. However, 3D panoptic scene completion is currently underexplored. This work introduces a novel framework for 3D panoptic scene completion that extends existing 3D semantic scene completion models. We propose an Object Module and Panoptic Module that can easily be integrated with 3D occupancy and scene completion methods presented in the literature. Our approach leverages the available annotations in occupancy benchmarks, allowing individual object shapes to be learned as a differentiable problem. The code is available at https://github.com/nicolamarinello/OffsetOcc .
Contrastive Learning for Multi-Object Tracking with Transformers
Nov 14, 2023The DEtection TRansformer (DETR) opened new possibilities for object detection by modeling it as a translation task: converting image features into object-level representations. Previous works typically add expensive modules to DETR to perform Multi-Object Tracking (MOT), resulting in more complicated architectures. We instead show how DETR can be turned into a MOT model by employing an instance-level contrastive loss, a revised sampling strategy and a lightweight assignment method. Our training scheme learns object appearances while preserving detection capabilities and with little overhead. Its performance surpasses the previous state-of-the-art by +2.6 mMOTA on the challenging BDD100K dataset and is comparable to existing transformer-based methods on the MOT17 dataset.
TripletTrack: 3D Object Tracking using Triplet Embeddings and LSTM
Oct 28, 2022



3D object tracking is a critical task in autonomous driving systems. It plays an essential role for the system's awareness about the surrounding environment. At the same time there is an increasing interest in algorithms for autonomous cars that solely rely on inexpensive sensors, such as cameras. In this paper we investigate the use of triplet embeddings in combination with motion representations for 3D object tracking. We start from an off-the-shelf 3D object detector, and apply a tracking mechanism where objects are matched by an affinity score computed on local object feature embeddings and motion descriptors. The feature embeddings are trained to include information about the visual appearance and monocular 3D object characteristics, while motion descriptors provide a strong representation of object trajectories. We will show that our approach effectively re-identifies objects, and also behaves reliably and accurately in case of occlusions, missed detections and can detect re-appearance across different field of views. Experimental evaluation shows that our approach outperforms state-of-the-art on nuScenes by a large margin. We also obtain competitive results on KITTI.
* Accepted to CVPR 2022 Workshop on Autonomous Driving