 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTo Stir or Not to Stir: Online Estimation of Liquid Properties for Pouring Actions
Apr 04, 2019
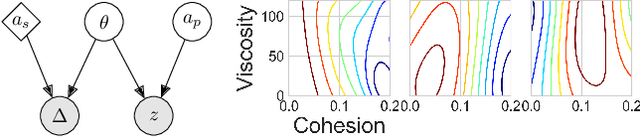
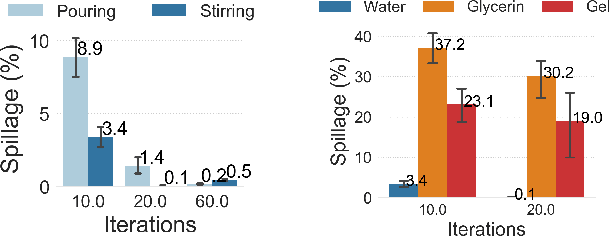
Our brains are able to exploit coarse physical models of fluids to solve everyday manipulation tasks. There has been considerable interest in developing such a capability in robots so that they can autonomously manipulate fluids adapting to different conditions. In this paper, we investigate the problem of adaptation to liquids with different characteristics. We develop a simple calibration task (stirring with a stick) that enables rapid inference of the parameters of the liquid from RBG data. We perform the inference in the space of simulation parameters rather than on physically accurate parameters. This facilitates prediction and optimization tasks since the inferred parameters may be fed directly to the simulator. We demonstrate that our "stirring" learner performs better than when the robot is calibrated with pouring actions. We show that our method is able to infer properties of three different liquids -- water, glycerin and gel -- and present experimental results by executing stirring and pouring actions on a UR10. We believe that decoupling of the training actions from the goal task is an important step towards simple, autonomous learning of the behavior of different fluids in unstructured environments.