 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpeculations on Uncertainty and Humane Algorithms
Aug 13, 2024
The appreciation and utilisation of risk and uncertainty can play a key role in helping to solve some of the many ethical issues that are posed by AI. Understanding the uncertainties can allow algorithms to make better decisions by providing interrogatable avenues to check the correctness of outputs. Allowing algorithms to deal with variability and ambiguity with their inputs means they do not need to force people into uncomfortable classifications. Provenance enables algorithms to know what they know preventing possible harms. Additionally, uncertainty about provenance highlights the trustworthiness of algorithms. It is essential to compute with what we know rather than make assumptions that may be unjustified or untenable. This paper provides a perspective on the need for the importance of risk and uncertainty in the development of ethical AI, especially in high-risk scenarios. It argues that the handling of uncertainty, especially epistemic uncertainty, is critical to ensuring that algorithms do not cause harm and are trustworthy and ensure that the decisions that they make are humane.
GLARE: A Dataset for Traffic Sign Detection in Sun Glare
Sep 19, 2022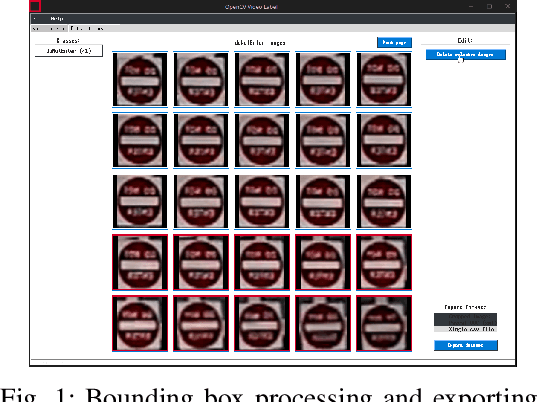
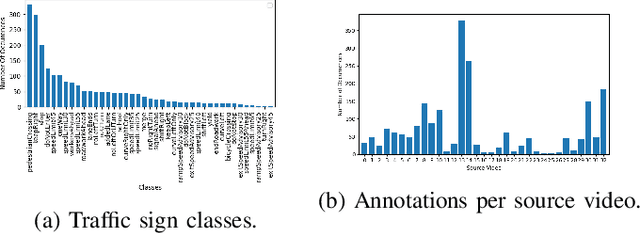
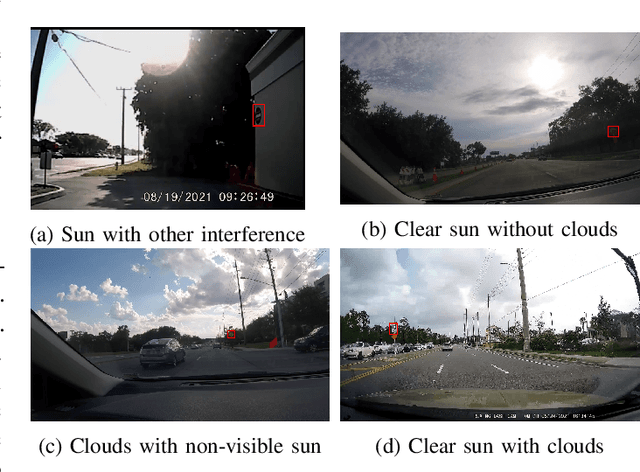
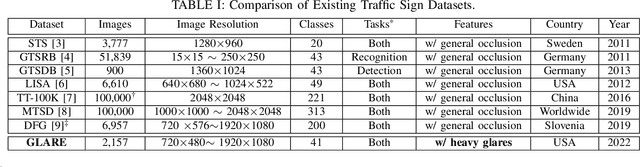
Real-time machine learning detection algorithms are often found within autonomous vehicle technology and depend on quality datasets. It is essential that these algorithms work correctly in everyday conditions as well as under strong sun glare. Reports indicate glare is one of the two most prominent environment-related reasons for crashes. However, existing datasets, such as LISA and the German Traffic Sign Recognition Benchmark, do not reflect the existence of sun glare at all. This paper presents the GLARE traffic sign dataset: a collection of images with U.S based traffic signs under heavy visual interference by sunlight. GLARE contains 2,157 images of traffic signs with sun glare, pulled from 33 videos of dashcam footage of roads in the United States. It provides an essential enrichment to the widely used LISA Traffic Sign dataset. Our experimental study shows that although several state-of-the-art baseline methods demonstrate superior performance when trained and tested against traffic sign datasets without sun glare, they greatly suffer when tested against GLARE (e.g., ranging from 9% to 21% mean mAP, which is significantly lower than the performances on LISA dataset). We also notice that current architectures have better detection accuracy (e.g., on average 42% mean mAP gain for mainstream algorithms) when trained on images of traffic signs in sun glare.
Logistic Regression Through the Veil of Imprecise Data
Jun 01, 2021



Logistic regression is an important statistical tool for assessing the probability of an outcome based upon some predictive variables. Standard methods can only deal with precisely known data, however many datasets have uncertainties which traditional methods either reduce to a single point or completely disregarded. In this paper we show that it is possible to include these uncertainties by considering an imprecise logistic regression model using the set of possible models that can be obtained from values from within the intervals. This has the advantage of clearly expressing the epistemic uncertainty removed by traditional methods.