 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Framework for Learning and Reusing Robotic Skills
Apr 29, 2024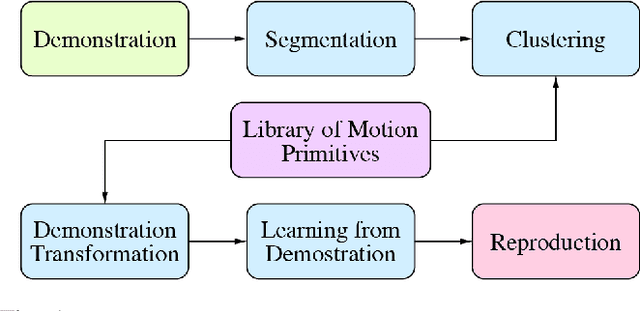
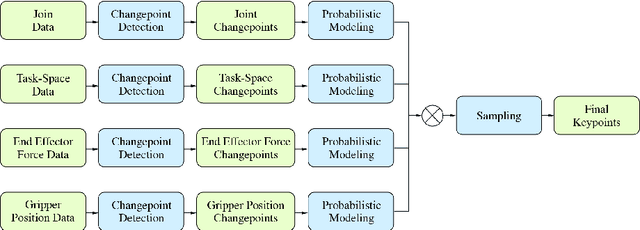
In this paper, we present our work in progress towards creating a library of motion primitives. This library facilitates easier and more intuitive learning and reusing of robotic skills. Users can teach robots complex skills through Learning from Demonstration, which is automatically segmented into primitives and stored in clusters of similar skills. We propose a novel multimodal segmentation method as well as a novel trajectory clustering method. Then, when needed for reuse, we transform primitives into new environments using trajectory editing. We present simulated results for our framework with demonstrations taken on real-world robots.
Weather Forecasting Error in Solar Energy Forecasting
Sep 24, 2017

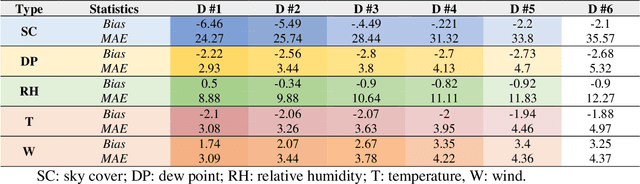
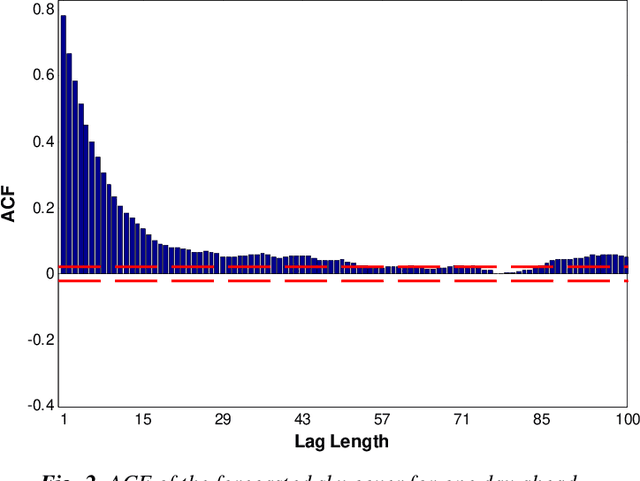
As renewable distributed energy resources (DERs) penetrate the power grid at an accelerating speed, it is essential for operators to have accurate solar photovoltaic (PV) energy forecasting for efficient operations and planning. Generally, observed weather data are applied in the solar PV generation forecasting model while in practice the energy forecasting is based on forecasted weather data. In this paper, a study on the uncertainty in weather forecasting for the most commonly used weather variables is presented. The forecasted weather data for six days ahead is compared with the observed data and the results of analysis are quantified by statistical metrics. In addition, the most influential weather predictors in energy forecasting model are selected. The performance of historical and observed weather data errors is assessed using a solar PV generation forecasting model. Finally, a sensitivity test is performed to identify the influential weather variables whose accurate values can significantly improve the results of energy forecasting.