 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParameter-Free Segmentation of Robot Movements with Cross-Correlation Using Different Similarity Metrics
May 09, 2025Often, robots are asked to execute primitive movements, whether as a single action or in a series of actions representing a larger, more complex task. These movements can be learned in many ways, but a common one is from demonstrations presented to the robot by a teacher. However, these demonstrations are not always simple movements themselves, and complex demonstrations must be broken down, or segmented, into primitive movements. In this work, we present a parameter-free approach to segmentation using techniques inspired by autocorrelation and cross-correlation from signal processing. In cross-correlation, a representative signal is found in some larger, more complex signal by correlating the representative signal with the larger signal. This same idea can be applied to segmenting robot motion and demonstrations, provided with a representative motion primitive. This results in a fast and accurate segmentation, which does not take any parameters. One of the main contributions of this paper is the modification of the cross-correlation process by employing similarity metrics that can capture features specific to robot movements. To validate our framework, we conduct several experiments of complex tasks both in simulation and in real-world. We also evaluate the effectiveness of our segmentation framework by comparing various similarity metrics.
A Framework for Learning and Reusing Robotic Skills
Apr 29, 2024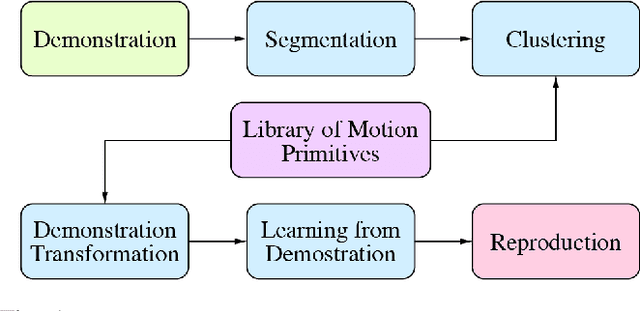
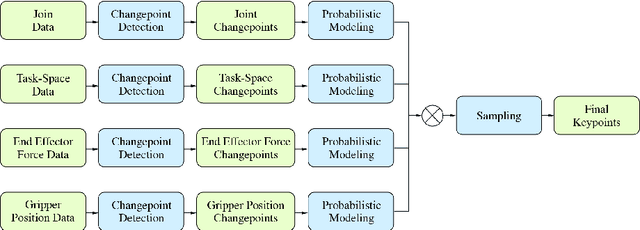
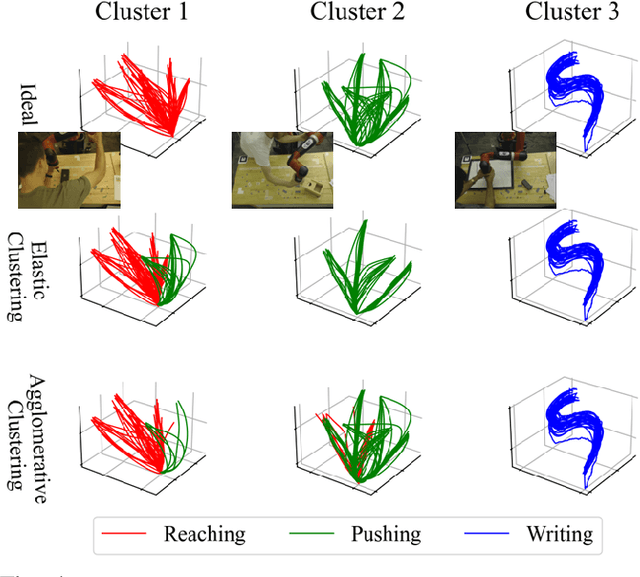
In this paper, we present our work in progress towards creating a library of motion primitives. This library facilitates easier and more intuitive learning and reusing of robotic skills. Users can teach robots complex skills through Learning from Demonstration, which is automatically segmented into primitives and stored in clusters of similar skills. We propose a novel multimodal segmentation method as well as a novel trajectory clustering method. Then, when needed for reuse, we transform primitives into new environments using trajectory editing. We present simulated results for our framework with demonstrations taken on real-world robots.