 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Weight Resampling and Optimizers Shape the Dynamics of Continual Learning and Forgetting in Neural Networks
Jul 02, 2025



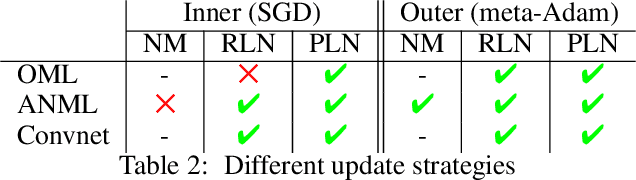
Recent work in continual learning has highlighted the beneficial effect of resampling weights in the last layer of a neural network (``zapping"). Although empirical results demonstrate the effectiveness of this approach, the underlying mechanisms that drive these improvements remain unclear. In this work, we investigate in detail the pattern of learning and forgetting that take place inside a convolutional neural network when trained in challenging settings such as continual learning and few-shot transfer learning, with handwritten characters and natural images. Our experiments show that models that have undergone zapping during training more quickly recover from the shock of transferring to a new domain. Furthermore, to better observe the effect of continual learning in a multi-task setting we measure how each individual task is affected. This shows that, not only zapping, but the choice of optimizer can also deeply affect the dynamics of learning and forgetting, causing complex patterns of synergy/interference between tasks to emerge when the model learns sequentially at transfer time.
Reset It and Forget It: Relearning Last-Layer Weights Improves Continual and Transfer Learning
Oct 12, 2023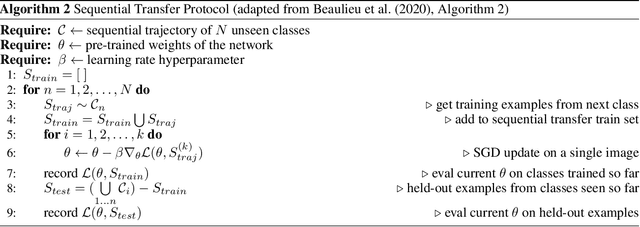
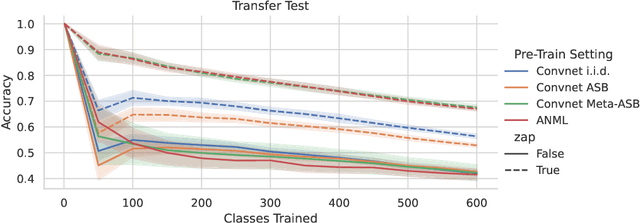
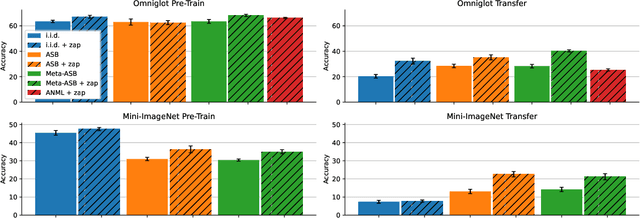
This work identifies a simple pre-training mechanism that leads to representations exhibiting better continual and transfer learning. This mechanism -- the repeated resetting of weights in the last layer, which we nickname "zapping" -- was originally designed for a meta-continual-learning procedure, yet we show it is surprisingly applicable in many settings beyond both meta-learning and continual learning. In our experiments, we wish to transfer a pre-trained image classifier to a new set of classes, in a few shots. We show that our zapping procedure results in improved transfer accuracy and/or more rapid adaptation in both standard fine-tuning and continual learning settings, while being simple to implement and computationally efficient. In many cases, we achieve performance on par with state of the art meta-learning without needing the expensive higher-order gradients, by using a combination of zapping and sequential learning. An intuitive explanation for the effectiveness of this zapping procedure is that representations trained with repeated zapping learn features that are capable of rapidly adapting to newly initialized classifiers. Such an approach may be considered a computationally cheaper type of, or alternative to, meta-learning rapidly adaptable features with higher-order gradients. This adds to recent work on the usefulness of resetting neural network parameters during training, and invites further investigation of this mechanism.
Beelines: Evaluating Motion Prediction Impact on Self-Driving Safety and Comfort
Nov 01, 2020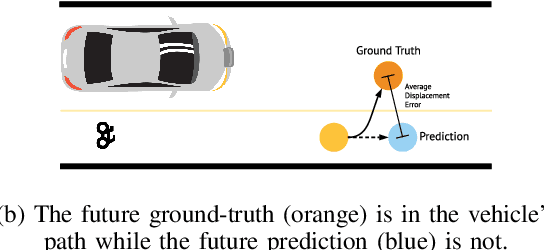

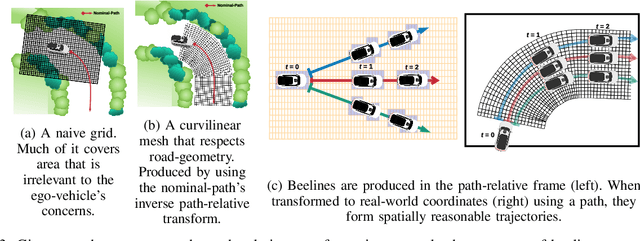
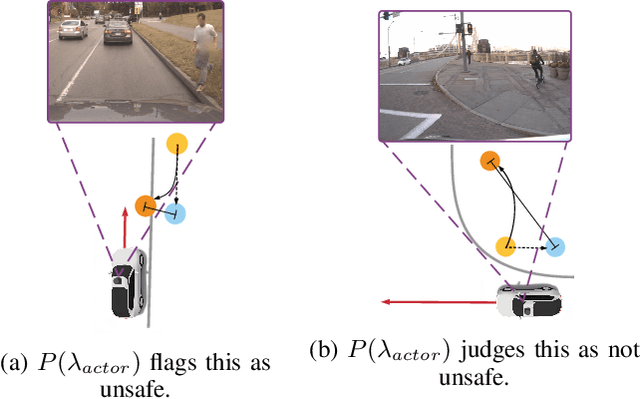
The commonly used metrics for motion prediction do not correlate well with a self-driving vehicle's system-level performance. The most common metrics are average displacement error (ADE) and final displacement error (FDE), which omit many features, making them poor self-driving performance indicators. Since high-fidelity simulations and track testing can be resource-intensive, the use of prediction metrics better correlated with full-system behavior allows for swifter iteration cycles. In this paper, we offer a conceptual framework for prediction evaluation highly specific to self-driving. We propose two complementary metrics that quantify the effects of motion prediction on safety (related to recall) and comfort (related to precision). Using a simulator, we demonstrate that our safety metric has a significantly better signal-to-noise ratio than displacement error in identifying unsafe events.