 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Approach for Road-Users Detection
Dec 02, 2021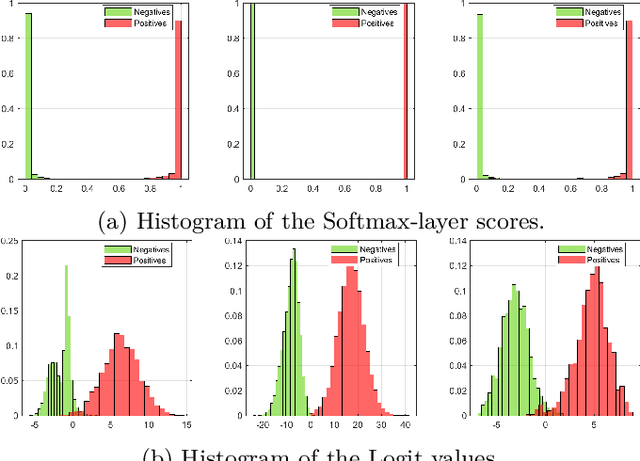

Object detection in autonomous driving applications implies that the detection and tracking of semantic objects are commonly native to urban driving environments, as pedestrians and vehicles. One of the major challenges in state-of-the-art deep-learning based object detection is false positive which occurrences with overconfident scores. This is highly undesirable in autonomous driving and other critical robotic-perception domains because of safety concerns. This paper proposes an approach to alleviate the problem of overconfident predictions by introducing a novel probabilistic layer to deep object detection networks in testing. The suggested approach avoids the traditional Sigmoid or Softmax prediction layer which often produces overconfident predictions. It is demonstrated that the proposed technique reduces overconfidence in the false positives without degrading the performance on the true positives. The approach is validated on the 2D-KITTI objection detection through the YOLOV4 and SECOND (Lidar-based detector). The proposed approach enables enabling interpretable probabilistic predictions without the requirement of re-training the network and therefore is very practical.
Probabilistic Object Classification using CNN ML-MAP layers
May 29, 2020



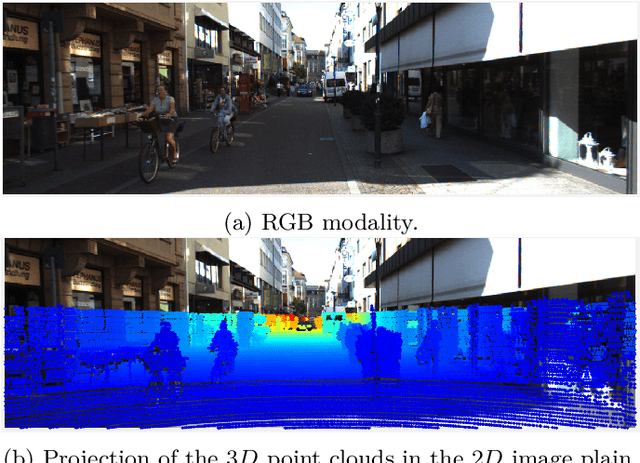
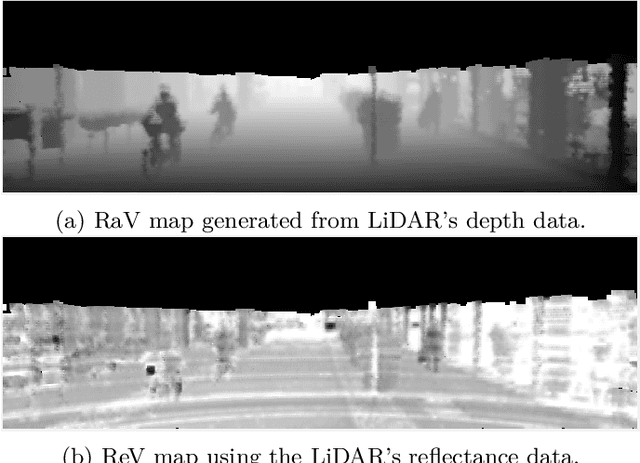
Deep networks are currently the state-of-the-art for sensory perception in autonomous driving and robotics. However, deep models often generate overconfident predictions precluding proper probabilistic interpretation which we argue is due to the nature of the SoftMax layer. To reduce the overconfidence without compromising the classification performance, we introduce a CNN probabilistic approach based on distributions calculated in the network's Logit layer. The approach enables Bayesian inference by means of ML and MAP layers. Experiments with calibrated and the proposed prediction layers are carried out on object classification using data from the KITTI database. Results are reported for camera ($RGB$) and LiDAR (range-view) modalities, where the new approach shows promising performance compared to SoftMax.