 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Investigation of Drivers' Dynamic Situational Trust in Conditionally Automated Driving
Dec 08, 2021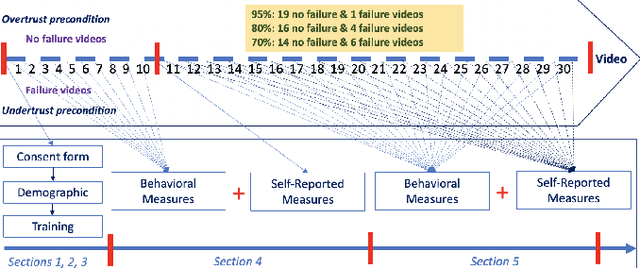
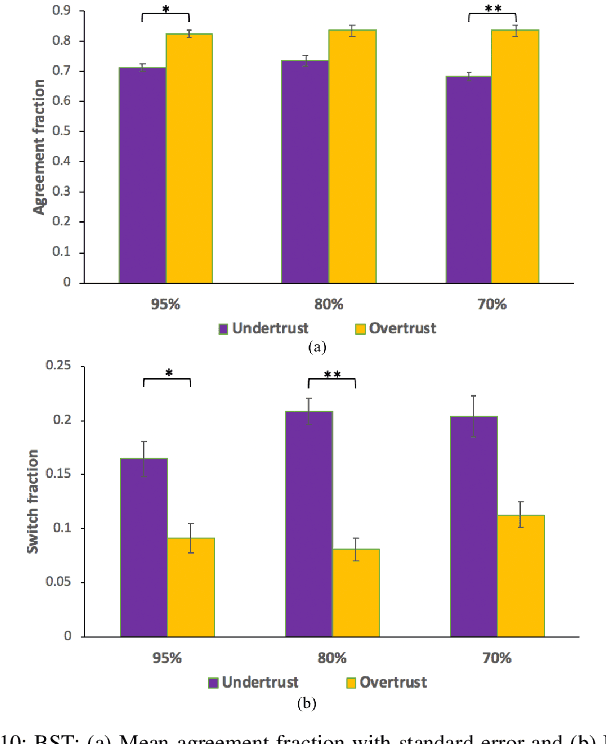
Understanding how trust is built over time is essential, as trust plays an important role in the acceptance and adoption of automated vehicles (AVs). This study aimed to investigate the effects of system performance and participants' trust preconditions on dynamic situational trust during takeover transitions. We evaluated the dynamic situational trust of 42 participants using both self-reported and behavioral measures while watching 30 videos with takeover scenarios. The study was a 3 by 2 mixed-subjects design, where the within-subjects variable was the system performance (i.e., accuracy levels of 95\%, 80\%, and 70\%) and the between-subjects variable was the preconditions of the participants' trust (i.e., overtrust and undertrust). Our results showed that participants quickly adjusted their self-reported situational trust (SST) levels which were consistent with different accuracy levels of system performance in both trust preconditions. However, participants' behavioral situational trust (BST) was affected by their trust preconditions across different accuracy levels. For instance, the overtrust precondition significantly increased the agreement fraction compared to the undertrust precondition. The undertrust precondition significantly decreased the switch fraction compared to the overtrust precondition. These results have important implications for designing an in-vehicle trust calibration system for conditional AVs.