 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End Monocular Vanishing Point Detection Exploiting Lane Annotations
Aug 31, 2021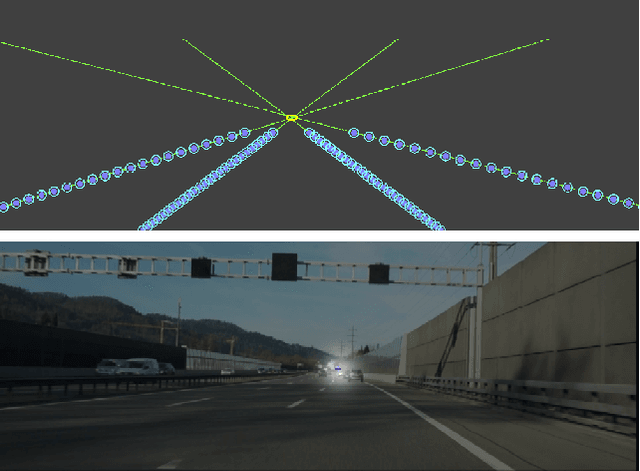
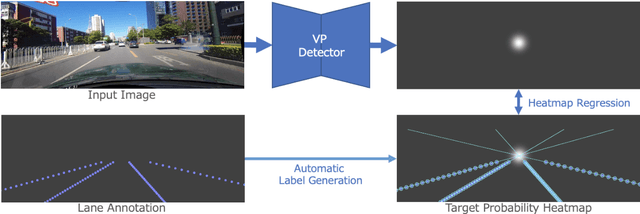
Vanishing points (VPs) play a vital role in various computer vision tasks, especially for recognizing the 3D scenes from an image. In the real-world scenario of automobile applications, it is costly to manually obtain the external camera parameters when the camera is attached to the vehicle or the attachment is accidentally perturbed. In this paper we introduce a simple but effective end-to-end vanishing point detection. By automatically calculating intersection of the extrapolated lane marker annotations, we obtain geometrically consistent VP labels and mitigate human annotation errors caused by manual VP labeling. With the calculated VP labels we train end-to-end VP Detector via heatmap estimation. The VP Detector realizes higher accuracy than the methods utilizing manual annotation or lane detection, paving the way for accurate online camera calibration.
Solar Power Plant Detection on Multi-Spectral Satellite Imagery using Weakly-Supervised CNN with Feedback Features and m-PCNN Fusion
Jun 21, 2017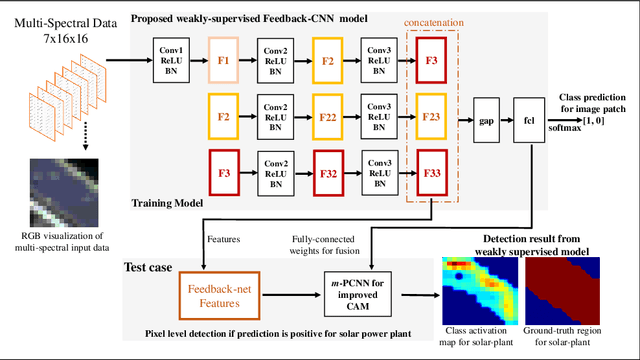

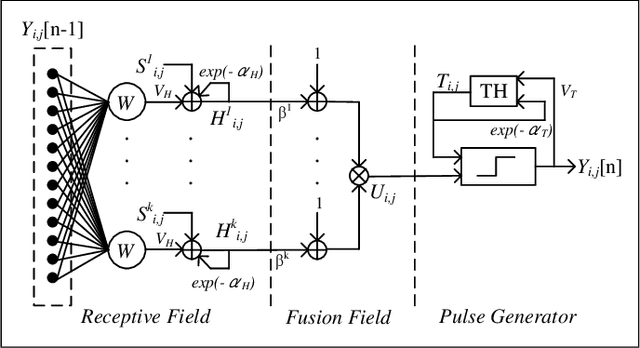
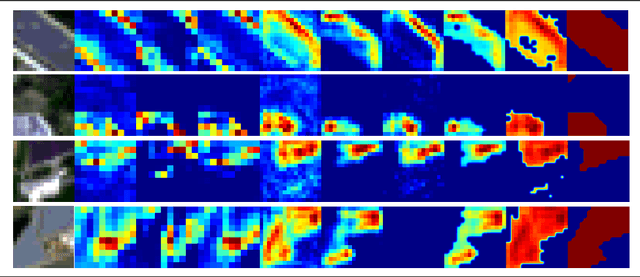
Most of the traditional convolutional neural networks (CNNs) implements bottom-up approach (feed-forward) for image classifications. However, many scientific studies demonstrate that visual perception in primates rely on both bottom-up and top-down connections. Therefore, in this work, we propose a CNN network with feedback structure for Solar power plant detection on middle-resolution satellite images. To express the strength of the top-down connections, we introduce feedback CNN network (FB-Net) to a baseline CNN model used for solar power plant classification on multi-spectral satellite data. Moreover, we introduce a method to improve class activation mapping (CAM) to our FB-Net, which takes advantage of multi-channel pulse coupled neural network (m-PCNN) for weakly-supervised localization of the solar power plants from the features of proposed FB-Net. For the proposed FB-Net CAM with m-PCNN, experimental results demonstrated promising results on both solar-power plant image classification and detection task.