 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesigning an Improved Deep Learning-based Model for COVID-19 Recognition in Chest X-ray Images: A Knowledge Distillation Approach
Jan 06, 2023



COVID-19 has adversely affected humans and societies in different aspects. Numerous people have perished due to inaccurate COVID-19 identification and, consequently, a lack of appropriate medical treatment. Numerous solutions based on manual and automatic feature extraction techniques have been investigated to address this issue by researchers worldwide. Typically, automatic feature extraction methods, particularly deep learning models, necessitate a powerful hardware system to perform the necessary computations. Unfortunately, many institutions and societies cannot benefit from these advancements due to the prohibitively high cost of high-quality hardware equipment. As a result, this study focused on two primary goals: first, lowering the computational costs associated with running the proposed model on embedded devices, mobile devices, and conventional computers; and second, improving the model's performance in comparison to previously published methods (at least performs on par with state-of-the-art models) in order to ensure its performance and accuracy for the medical recognition task. This study used two neural networks to improve feature extraction from our dataset: VGG19 and ResNet50V2. Both of these networks are capable of providing semantic features from the nominated dataset. To this end, An alternative network was considered, namely MobileNetV2, which excels at extracting semantic features while requiring minimal computation on mobile and embedded devices. Knowledge distillation (KD) was used to transfer knowledge from the teacher network (concatenated ResNet50V2 and VGG19) to the student network (MobileNetV2) to improve MobileNetV2 performance and to achieve a robust and accurate model for the COVID-19 identification task from chest X-ray images.
Design and Implementation of a Fuzzy Adaptive Controller for Time-Varying Formation Leader-Follower Configuration of Nonholonomic Mobile Robots
May 23, 2022
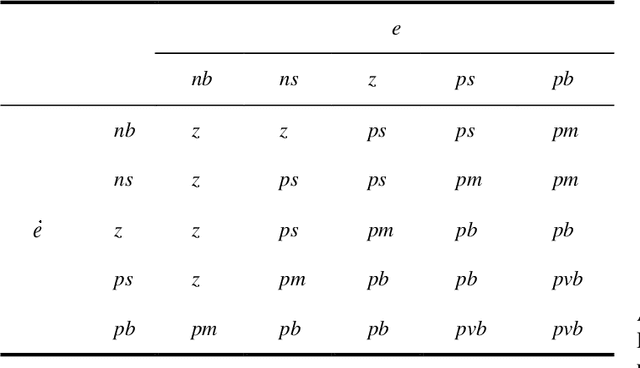


In this paper, a time-varying leader-follower formation control of nonholonomic mobile robots based on a trajectory tracking control strategy is considered. In the time-varying formation, the relative bearing and distance of each follower are variable parameters, and therefore, the followers can carry out various and complex behaviour even without changing the linear and angular velocities of the leader robot. After proposing the kinematic model of the time-varying leader-follower formation, the backstepping control method is exploited to keep the structure of the defined formation. The global stability of the formation is investigated using the Lyapunov theorem. Moreover, the designed nonlinear controller suffers from the ineffectual large input commands at the beginning of the formation. To rectify this problem, a fuzzy adaptive algorithm is proposed to improve the backstepping controller and the global stability of the resulting fuzzy adaptive backstepping controller is guaranteed. Considering the rate change of relative distance and bearing in the kinematic model of the leader-follower formation and controller design procedure, makes the formation more practical in dynamic and clutter environments, as well as capable of defining complicated behaviour for followers, and provides crash and obstacle avoidance without switching between different control strategies. Finally, the performance of the proposed kinematics model and designed controllers are investigated through simulations and experimental studies.