 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCharacterizing Structured versus Unstructured Environments based on Pedestrians' and Vehicles' Motion Trajectories
Feb 24, 2025



Trajectory behaviours of pedestrians and vehicles operating close to each other can be different in unstructured compared to structured environments. These differences in the motion behaviour are valuable to be considered in the trajectory prediction algorithm of an autonomous vehicle. However, the available datasets on pedestrians' and vehicles' trajectories that are commonly used as benchmarks for trajectory prediction have not been classified based on the nature of their environment. On the other hand, the definitions provided for unstructured and structured environments are rather qualitative and hard to be used for justifying the type of a given environment. In this paper, we have compared different existing datasets based on a couple of extracted trajectory features, such as mean speed and trajectory variability. Through K-means clustering and generalized linear models, we propose more quantitative measures for distinguishing the two different types of environments. Our results show that features such as trajectory variability, stop fraction and density of pedestrians are different among the two environmental types and can be used to classify the existing datasets.
Uncertainty-Aware DRL for Autonomous Vehicle Crowd Navigation in Shared Space
May 22, 2024



Safe, socially compliant, and efficient navigation of low-speed autonomous vehicles (AVs) in pedestrian-rich environments necessitates considering pedestrians' future positions and interactions with the vehicle and others. Despite the inevitable uncertainties associated with pedestrians' predicted trajectories due to their unobserved states (e.g., intent), existing deep reinforcement learning (DRL) algorithms for crowd navigation often neglect these uncertainties when using predicted trajectories to guide policy learning. This omission limits the usability of predictions when diverging from ground truth. This work introduces an integrated prediction and planning approach that incorporates the uncertainties of predicted pedestrian states in the training of a model-free DRL algorithm. A novel reward function encourages the AV to respect pedestrians' personal space, decrease speed during close approaches, and minimize the collision probability with their predicted paths. Unlike previous DRL methods, our model, designed for AV operation in crowded spaces, is trained in a novel simulation environment that reflects realistic pedestrian behaviour in a shared space with vehicles. Results show a 40% decrease in collision rate and a 15% increase in minimum distance to pedestrians compared to the state of the art model that does not account for prediction uncertainty. Additionally, the approach outperforms model predictive control methods that incorporate the same prediction uncertainties in terms of both performance and computational time, while producing trajectories closer to human drivers in similar scenarios.
Polar Collision Grids: Effective Interaction Modelling for Pedestrian Trajectory Prediction in Shared Space Using Collision Checks
Aug 13, 2023



Predicting pedestrians' trajectories is a crucial capability for autonomous vehicles' safe navigation, especially in spaces shared with pedestrians. Pedestrian motion in shared spaces is influenced by both the presence of vehicles and other pedestrians. Therefore, effectively modelling both pedestrian-pedestrian and pedestrian-vehicle interactions can increase the accuracy of the pedestrian trajectory prediction models. Despite the huge literature on ways to encode the effect of interacting agents on a pedestrian's predicted trajectory using deep-learning models, limited effort has been put into the effective selection of interacting agents. In the majority of cases, the interaction features used are mainly based on relative distances while paying less attention to the effect of the velocity and approaching direction in the interaction formulation. In this paper, we propose a heuristic-based process of selecting the interacting agents based on collision risk calculation. Focusing on interactions of potentially colliding agents with a target pedestrian, we propose the use of time-to-collision and the approach direction angle of two agents for encoding the interaction effect. This is done by introducing a novel polar collision grid map. Our results have shown predicted trajectories closer to the ground truth compared to existing methods (used as a baseline) on the HBS dataset.
Pedestrian Trajectory Prediction in Pedestrian-Vehicle Mixed Environments: A Systematic Review
Aug 11, 2023



Planning an autonomous vehicle's (AV) path in a space shared with pedestrians requires reasoning about pedestrians' future trajectories. A practical pedestrian trajectory prediction algorithm for the use of AVs needs to consider the effect of the vehicle's interactions with the pedestrians on pedestrians' future motion behaviours. In this regard, this paper systematically reviews different methods proposed in the literature for modelling pedestrian trajectory prediction in presence of vehicles that can be applied for unstructured environments. This paper also investigates specific considerations for pedestrian-vehicle interaction (compared with pedestrian-pedestrian interaction) and reviews how different variables such as prediction uncertainties and behavioural differences are accounted for in the previously proposed prediction models. PRISMA guidelines were followed. Articles that did not consider vehicle and pedestrian interactions or actual trajectories, and articles that only focused on road crossing were excluded. A total of 1260 unique peer-reviewed articles from ACM Digital Library, IEEE Xplore, and Scopus databases were identified in the search. 64 articles were included in the final review as they met the inclusion and exclusion criteria. An overview of datasets containing trajectory data of both pedestrians and vehicles used by the reviewed papers has been provided. Research gaps and directions for future work, such as having more effective definition of interacting agents in deep learning methods and the need for gathering more datasets of mixed traffic in unstructured environments are discussed.
Using Affect as a Communication Modality to Improve Human-Robot Communication in Robot-Assisted Search and Rescue Scenarios
Aug 20, 2022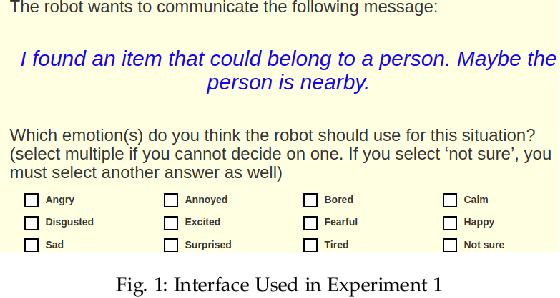
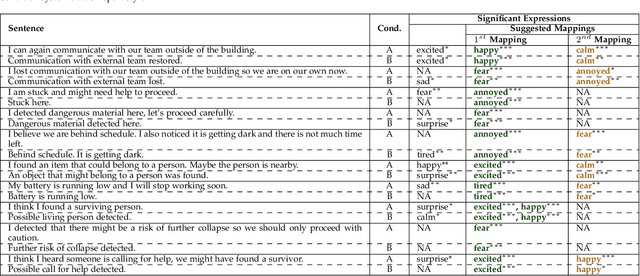
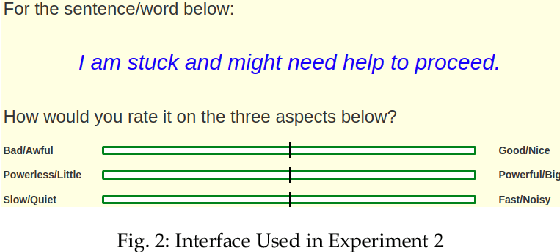
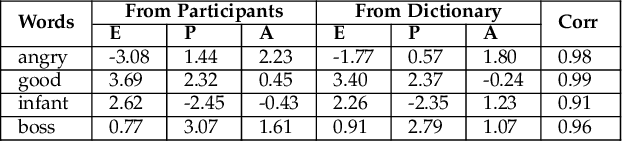
Emotions can provide a natural communication modality to complement the existing multi-modal capabilities of social robots, such as text and speech, in many domains. We conducted three online studies with 112, 223, and 151 participants to investigate the benefits of using emotions as a communication modality for Search And Rescue (SAR) robots. In the first experiment, we investigated the feasibility of conveying information related to SAR situations through robots' emotions, resulting in mappings from SAR situations to emotions. The second study used Affect Control Theory as an alternative method for deriving such mappings. This method is more flexible, e.g. allows for such mappings to be adjusted for different emotion sets and different robots. In the third experiment, we created affective expressions for an appearance-constrained outdoor field research robot using LEDs as an expressive channel. Using these affective expressions in a variety of simulated SAR situations, we evaluated the effect of these expressions on participants' (adopting the role of rescue workers) situational awareness. Our results and proposed methodologies provide (a) insights on how emotions could help conveying messages in the context of SAR, and (b) evidence on the effectiveness of adding emotions as a communication modality in a (simulated) SAR communication context.
Social Companion Robots to Reduce Isolation: A Perception Change Due to COVID-19
Aug 12, 2020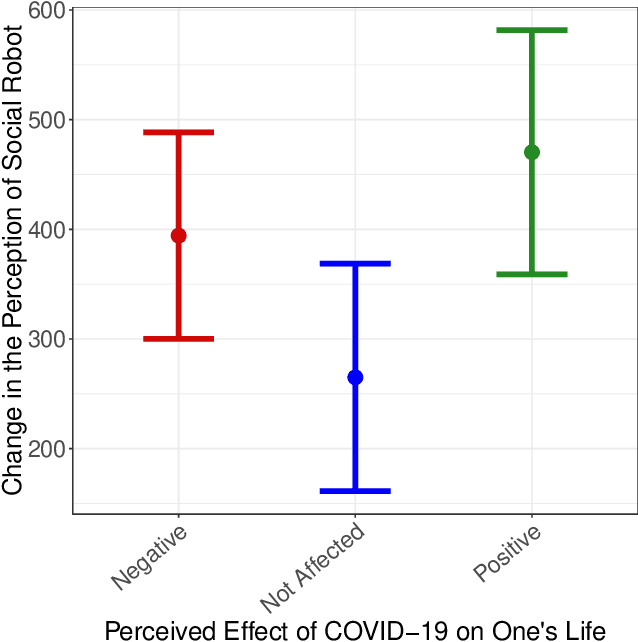
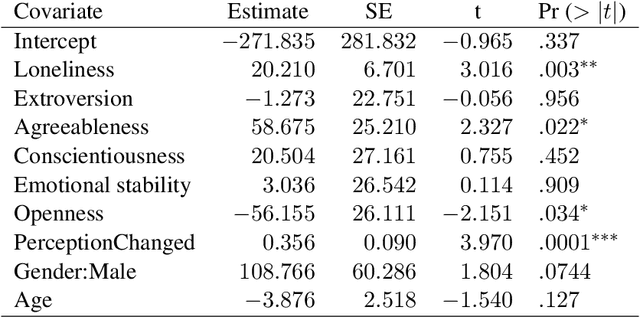
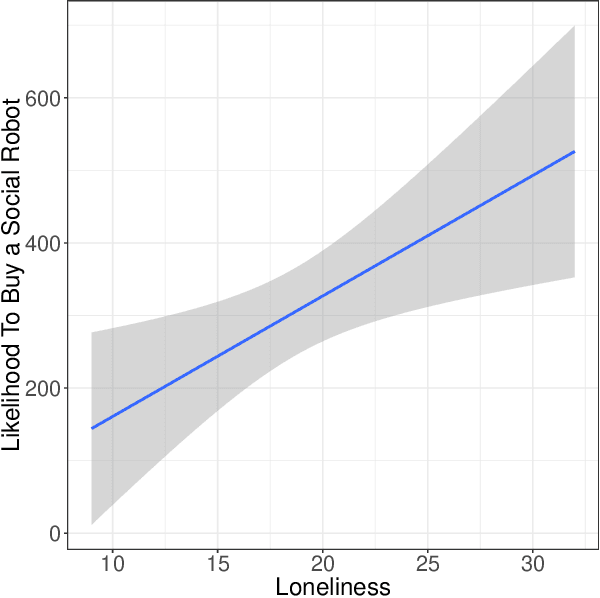
Social isolation is one of the negative consequences of a pandemic like COVID-19. Being socially isolated and the experience of loneliness is not only experienced by older adults, but also by younger people who live alone and cannot communicate with others or get involved in social situations as they used to. In the absence of `face-to-face' contact with a human companion, there is a potential for robotic companions to reduce loneliness. Here, we present results from an online study showing that a change caused by COVID-19 has affected people's perception of social robots, as companions, and that the feeling of loneliness can drive the purchase of a social robot.
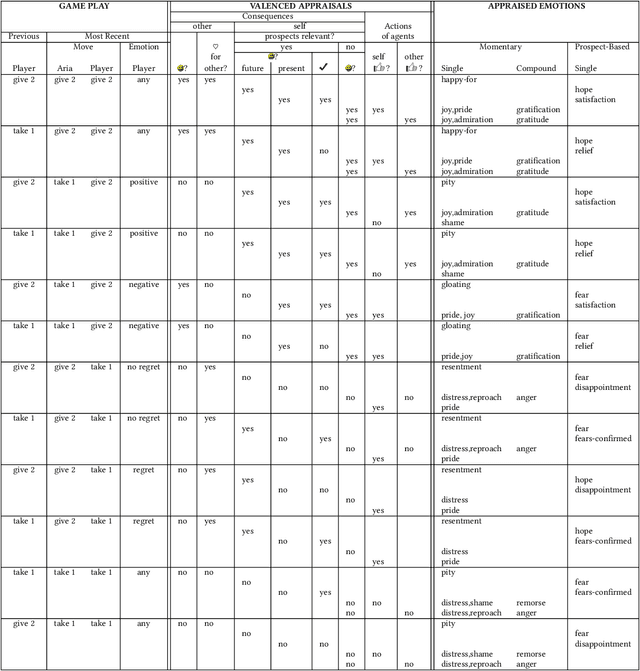
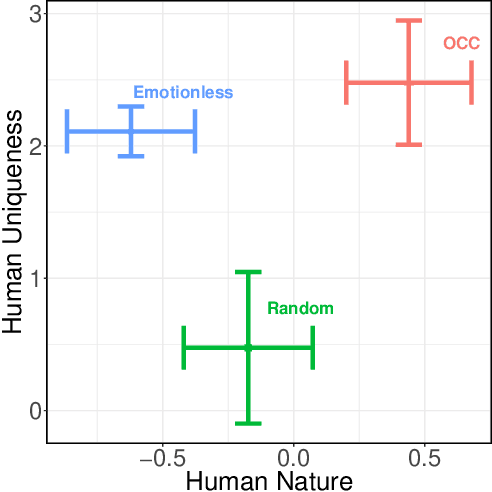
Improving Humanness of Virtual Agents and Users' Cooperation through Emotions
Mar 10, 2019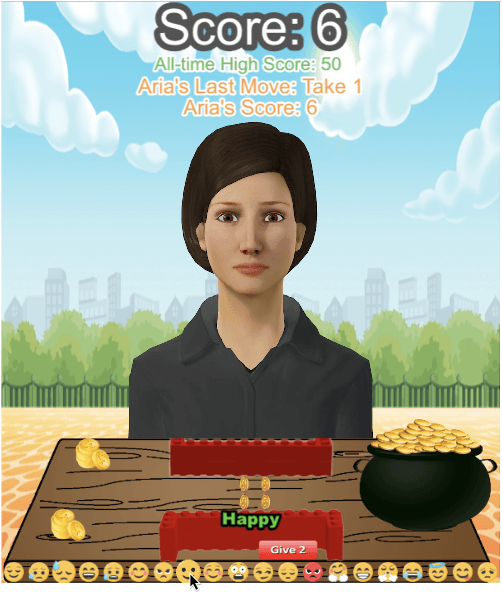

In this paper, we analyze the performance of an agent developed according to a well-accepted appraisal theory of human emotion with respect to how it modulates play in the context of a social dilemma. We ask if the agent will be capable of generating interactions that are considered to be more human than machine-like. We conduct an experiment with 117 participants and show how participants rate our agent on dimensions of human-uniqueness (which separates humans from animals) and human-nature (which separates humans from machines). We show that our appraisal theoretic agent is perceived to be more human-like than baseline models, by significantly improving both human-nature and human-uniqueness aspects of the intelligent agent. We also show that perception of humanness positively affects enjoyment and cooperation in the social dilemma.